Published by Badr Mesned Alshammari1, Tariq Masood2, Muhammad Tajammal Chughtai1, Samer Karim3, University of Hail, Hail, Saudi Arabia (1), Dukhan Operations, Qatar Petroleum (2), Maintenance Department QAFAC (3)
Abstract. This article presents a comparative study through analyses regarding a number of power electronics devices. Power Electronic devices have innovative contribution to control the electrical power operations with a degree of precision. The GTO normally are not equipped with amplifying gates. The Asymmetric GTOs are inherently equipped with fast recovery diodes across each GTO, for reverse operations based on the that reverse voltage capability is not required for GTOs operations. This also provide techno economic benefits high voltage, voltage drop and current ratings capability. It can sustain against, short and long-time overcurrent.
Streszczenie. W artykule przedstawiono analize porównawczą różnych elementów elektronicznych stosowanych w energoelektronice. Analizowano także wpływ właściwości tych elementów na prtacę urządzeń energetyki, takich jak np. sterowniki wysokonapięciowe FACTS. Analiza wpływu właściwości elementów elektronicznych na pracę układów energoelektroniki, takich jak sterownik FACTS.
Keywords: diode, transistor, thyristor, FACTS Devices
Słowa kluczowe: elementy elektroniczne, układy energoelektroniki
Introduction
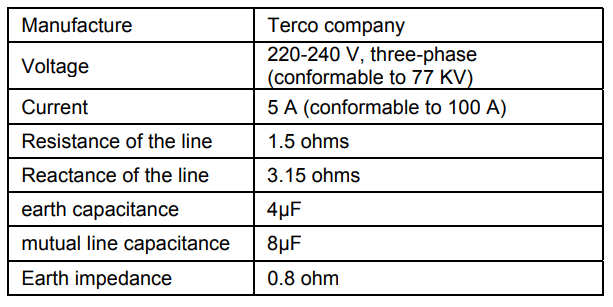
Electrical power system operations never been ideal, as the load vary the power utilities will use its maximum capability to manage the operating scenarios requirements as occurred. We are very much conversant as the load increases; the power utilities will use their maximum facilities to meet the requirements. The innovation of GTO Thyristors led toward development of power transmission Operational control that provide flexible controllability for the power transmission network with a degree of precision. Herewith, we have simulated 400 Mvar 400 kV TCSC (Thyristor Control Series Capacitor) and +200Mvar, 220 kV STATCOM (static synchronous compensator) which have been introduced in UPFC control mechanism at the GCC Power grid [1].
a) Diode
This is a two layers device which conduct unidirectional operations, this device also operates forward direction from Anode to Cathode. The diode device did not equip with gate to control the forward conduction. The diode did not conduct in reverse direction when diode polarity is reversed, the cathode become positive against the anode polarity.
b) Transistor
This is three layers device (electrodes) and it conducts in forward direction when collector (electrode) is biased positive with respect to emitter. The transistor will start functioning, when current or voltage signal is applied to the device, this is called the base part of the Transistor.
c) Thyristor
This device contains four layers, it conducts fully in forward direction when anode is at positive potential against the cathode. The turn on signal of voltage or current applied to operate the third electrode known as gate. There are two types of Thyristor, firstly symmetrical device equipped to block both forward and reverse directions and the other symmetrical device which blocks only the forward direction. Thyristor is an essential device for the FACTS Controllers.
Power Electronics application
a) GTO Operations
The Power Electronic devices have innovative contribution to control electrical power operations and control it with a degree of precision. In order to turn on a GTO gate it required 3-4% current of 1000A GTO device for a time of 10Sec. However, for the GTO turn off operation, it required 30-40% current pulse for an interval of 20- 35Sec. In order to drive high current, pulse required low voltage from 10-15 Volts and this pulse remained in operations up to 20-40Sec. It indicates that the GTO turn off operations required very small energy. But large losses and significant cooling factors are economical limitation for the GTO operations. For the GTO to turn-off it required 10- 15% energy as compared to GTO turn on energy required 10-15 for the Thyristor device. The GTO did not equip with amplifying gates. The Asymmetric GTOs inherently are equipped with fast recovery diode connected across each GTO. For reverse operations which is based on reverse voltage capability is not required for GTOs operations. This also provide techno economic benefits such as high voltage, voltage drop and current ratings capability. It can sustain against, short and long-time overcurrent [2].
b) Turn on and Turn off Operations
As discussed above the GTOs inherently acquired high switching losses and stress during turn on and turn off processes with associated device. During turn-on process the current pulse of 3-4% is applied to the load current for 10 microseconds with a fast increase gate-circuit inherently in-built inductance which is pertained from gate to cathodecircuit to start the operations. There is small delay before the cathode and anode circuit current operations to rise and voltage begins to fall immediately. The GTO turn-off process is executed by reverse conducting diode operations, this is another valve like situation in the same operational phase. This is important to learn that during GTO turn on operations, large reverse leakage current of the diode can be anticipated. Therefore, on turn-on operations it is very important and to consider some current from 0.2-45% to be maintained to prevent unlatching of the GTO. This is also known back porch current. As demonstrated below in Figure 1(a) the GTO can be turned off by –ve and turn on by +ve gate signal. Sometimes the Thyristor gate did not properly go off and lose their control. In order to switch off properly, a special technique is used this is also known commutation. Due to commutation, this device is not viable economically. Therefore, the GTO is technically and economically being justified. In the diode symbol, there are two arrows the forward arrow shows positive signal to turn on the GTO and backward arrow shows negative signal to turn-off the GTO. Figure 1(b) shows the two transistor PNP and NPN back to back analogy, it becomes as a GTO connection. The PNP transistor acquired low gain value, the Thyristor is switched on when positive gate supply is provided. When current is flowing from Anode this is known emitter current (IE1) and (IB1) and collector current (IC1) this flows through NPN transistor. When G1 gate is activated with +ve pulse current the current start flowing from anode to the cathode, and a current pulse flows from G1 to cathode. When –ve current pulse is applied at G1 the collector current would not reduce but will remain the same and oppose the IB2 based current and the GTO will be turned off. This high-performance device used for FACTS/HVDC devices in particularly for reactive power compensation and adjustable frequency inverter [3,4].

MTO Operations
MOS Turn-on Thyristor device which is developed as a combination of MOSFET and GTO devices. In order to address conventional GTO operational issue, the MTO is the solution to address the limitation of GTO application as given below.
Snubber circuit, dv/dt and Gate drive power requirements.
The MTO gives more significant performance, it required very small power to drive the gate and also reduced turn off time from 20-30µsec to 1-2µsec, leading to reduction of device system cost. It also reduced the losses because of eliminated storage time which demonstrates high dv/dt at small snubber capacitors and eradicated snubber resistance in the MTO circuit. This is combination of MOSFET and GTO devices.
ETO Operations
ETO Operations contain two Gates, one gate is used to turn on and other is in series to (MOSFET) and is used for turn-off. The Turn-off voltage applied at the N-MOSFET, transfers all the current from the cathode via MOSFET into the base. It occurred the fast turn-off and stopping the regenerating latched state. This is also imperative, the MOSFET did not see high voltage, no matter how high ETO voltage occurred. The ETO contains following merit and demerit as listed below.
• The main advantage of the series MOSFET gate is that the current transfer from cathode is wide-ranging and swift.
• The MOSFET carry the main GTO current, leading to increase the voltage drop and corresponding losses. In fact the MOSFET is low voltage control device from 0.3 to 0.5V, whereas, this is not significant.
GCT and IGCT Operations
GCT (Gate commutated Thyristor) is hard switched GTO which contains high large and swift current pulse which allow the full rated flow of current. To reduce the inductance of the Gate circuit to a lowest possible value, a fast-rising high gate current pulse is applied by incorporating special efforts of the GCT (IGCT), as required for the ETO and MTO to the possible extent. Key element is that GCT is being achieved by fast gate drive response and this is attained by applying coaxial cathode-gate which is feed through a multi-layered gate derive circuit.
IGBT Operations
This is combination of BJT and PMOSFET having high input impedance and low on state power loss as it happens in case of a BJT. This device is also known as metal oxide insulated gate transistor (MOSIGT) and it conductively modulated field effect transistor (COMFET), gain modulation FET(GEMFET) and insulated gate transistor (IGT). Figure 2(a) depicts when Vcc is supplied, it will pass to collector also known as IC (collector current). If there is zero voltage at VG (gate voltage) then VCE (collector emitter voltage) and VCC will be equal. When VG (Gate Voltage) is provided it will produce VGE (gate emitter voltage) as soon as it increases the VCE will reduce against the Vcc this point is called the breakdown point and IGBT starts conducting. Figure 2(b) represents the VGE against the Ic (collector current) as the VGE voltage increases the Ic will increases the VGEt is called the (gate threshold voltage) as Ic starts flowing at its maximum value [5].


Figure 3 presents the IGBT characteristics, this depicts a graph between Ic (collector current) and Vce (Collector Emitter Voltage). When VGE is equal to zero as given, IGBT will remain in off position or cut-off condition during that time whatever current flows this is called the leakage current. As the VG supply increases the VGE1 will increase and reach its breakdown point where IGBT starts conducting, as soon as the base voltage increases the VGE2, VGE3, VGE4, and VGE5 will also increases, under this condition the IC will reach at its active state and stabilize, this is conduction state of the IGBT. In the graph, red line represents the load line when IGBT will be on the VCE (Collector Emitter Voltage) and it is zero and IC will be at its maximum. As soon as the collector current stabilizes this is known as active line of the IGBT operations [7,8].
MCT Operations
This device incorporates the MOSFET structure for both turn-on and turn-off operations and also gives fast turn-off and turn-on operations with low switching losses. The required power and energy for this operation is very small or negligible. It also contains characteristic of delay time (storage time). Secondly as latching device operations it contains low on state voltage drop with precision as for Thyristor.
Main advantage of this device compared to other turnoff devices. The MOS gate both turn-on and off operation is very close to the distributed cathode, this may lead to incur low switching losses at fast switching operations for Thyristor device. This device also demonstrates ultimate Thyristor operations with low on-state switching losses.
MOSFET Operations
This type of transistor can carry the fast switching speed and low switching losses and also controlled by applying voltage rather than current. This is extensively used for low power devices application but unsuitable for high power devices. This device required low energy to operate and comprises with very fast switching speed and low switching losses.
This is an ideal for gate amplifying device because it has high forward on-state resistance as well as high on-state losses. Therefore, this device is not suitable for power devices operations.
FACTS/HVDC Technology development where it is today
First HVDC project commission in 1954 at Gotland with 100 kV and carry only 20-Megawatt DC power. Recently, due to technological developments the HVDC voltage reached at 800 kV and power transferable capacity approached up to 8000 MW. In fact, the innovation of Thyristor valve replaced the mercury arc valve in 1960. The Thyristor based HVDC converter and inverter-based station was commissioned in 1972. The Thyristor based HVDC control topology was simple as compared to mercury arc control valve. Secondly, maintenance and operating cost was nominal as compared to mercury arc control valve. As discussed earlier, the Thyristor has a drawback that is it has only turn-on capability but not turn-off. This is not possible to leave the device in none-conducting mode. In fact, noneconducting mode is managed and control by the network grid electrical flow which leads the device to respond to a reverse bias operation and this cannot be controlled directly.
Thyristor was used first time in 1970 and many innovative developments have been witnessed and is still being used predominantly in the World by large. This device is well reputed and matured for its application in large power transmission generation and transmission network from hundreds to thousands of megawatts. Whereas, the IGBT has an advanced level of Thyristor based control in HVDC/FCTS controllers.
The major difference in IGBT and Thyristor is that IGBT has a turn-on and turn-off capability from external control signal. It has acquired advance and independent operational control and has no relation to network grid power flow. As far as the installation is concerned it has very small footprint which is easy to accommodate and power flow from/to offshore power generation facilities. This is superior device compare to Thyristor but with limited power flow capabilities. This is new device, still lot of innovation is required to fit in HVDC/FACTS devices purposefully. As we have discussed earlier the IGBT based HVDC has been developed and implemented up to 1000 megawatt per pole and Thyristor based HVDC has reached at 8000 megawatts[9].
Table 1: Abbreviation and Synonyms

Study Comparative Analyses of Thyristor and Transistor Operations
The transistor devices principally have an excellent switching performance, its fast switching conduction operations and lower switching losses. But Thyristor has low switching losses and it can handle higher power capability as compared to the Transistor control and switching operations. Further development is in progress to achieve best of both Thyristor control and on-state operations having low switching losses and to handle higher power capability.
Conclusion
This paper presents the promising operational impact of GTOs to enhance the performance of the FACTS devices (UPFC, STATCOM, SSSC) Controller on Multiple Bus system on the power grid which is assessed by using Matlab modeling and simulation. The Matlab tool is very much expedient to identify and determine the GTOs behavioural characteristic performance. These GTOs have versatile capability and capacity. EMTP is used to validate the Matlab model credibility. TNA has confirmed GCC network operational credibility of the approximation and developed new power system operational technique. The Matlab codes are provided and developed step by step to perform fast pragmatic operational studies to Assess UPFC suitability and application on the GCC Power grid.
REFERENCES
1. Wollard K., Uno lamm: inventor and activist, IEEE Sectrume., 25(1988), nr 3, 43-45
2. Kimbark E.W., Direct Current Transmission. New York: Wiley, vol.1,1971.
3. Siemens _High Voltage DC transmission system (HVDC), (2017), http://www.energy.siemens.com/hq/en/powertransmission/hbdc/
4. Okeke T., Zaher R., Flexible AC Transmission Systems (FACTS) published IEEE Conference, (2013)
5. Bocovich M., Mohan N., Overview of Series Connected Flexible AC Transmission Systems (FACTS), IEEE Conference ( 2013)
6. X.Y Zhou X. Y., Aggarwal R. K., Detailed modelling and simulation of UPFC using EMTP, IEEE Conference ( 2014)
7. Yadav M., Soni A., Improvement of power flow and voltage stability using unified power flow controller, ICEEOT (2016).
8. Masood T., Qureshi S.A., FACTS Control Devices (STATCOM, SSSC and UPFC) Re-Configuration Techniques By PSIM/MATLAB, IEEE-ICEE (2007) Lahore, Pakistan
9. U. Lamm A. U., The peculiarties of high-voltage dc power transmission, IEEE Spectrum., 3(1966), nr.8, 76-84.
Authors: Dr. Badr Mesned Alshammari, Associate Professor, Department of Electrical Engineering, College of Engineering, University of Hail, Hail, KSA. E-mail: bms.alshammari@uoh.edu.sa; Dr. Tariq Masood, Dukhan Operations, Qatar Petroleum, Qatar. E-mail: t.masood.dr@bath.edu; Prof. Dr. Muhammad Tajammal Chughtai, Department of Electrical Engineering, College of Engineering, University of Hail, Hail, KSA. Email: chughta@yahoo.com; Samer Karim, Maintenance Department, QAFAC, Qatar. E-mail: samerk@qafac.com.qa .
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 96 NR 3/2020. doi:10.15199/48.2020.03.25