Published by Joe Doughney and Lilly Vang, Consulting-Specifying Engineer, Electrical Articles: Electrical grounding and bonding per NEC, December 9, 2020.
Understanding correct grounding and bonding design and construction is crucial for proper electrical system operation and personnel safety
Learning Objectives
• Learn the proper electrical grounding terminologies.
• Understand National Electrical Code grounding and bonding requirements for solidly grounded alternating current low-voltage systems (below 1,000 volts).
•Prevent common grounding and bonding design and construction errors.
Electrical grounding and bonding is one of the many misunderstood topics of discussion in the design and construction industry. There are two main reasons for understanding grounding and applying the correct design for grounding and bonding: safety and correct operation of sensitive electronic equipment.
NFPA 70: National Electrical Code Article 250 covers the minimum requirements for grounding and bonding and, although the NEC lists requirements to abide by, it should not be taken as a design manual. Some terms and requirements discussed may be true for the European standards, however, the intent of this article is to clarify grounding and bonding design seen in the United States.
Grounding and bonding requirements
Article 250 is a complex portion of the NEC and covers many different types of systems: grounded systems (less than 50 volts, 50 to 1,000 volts and greater than 1,000 volts), ungrounded systems, systems greater than 1,000 volts, impedance grounded neutral systems, direct current systems, separately derived systems and grounding of instrument and meters/relays. The intent of this article is to discuss the requirements of solidly grounded, alternating current electrical systems less than 1,000 volts.
Grounding and bonding practices are important and required per NEC because when done properly, it will protect personnel from electrical shock hazards and ensure electrical system operation. These practices perform the following functions:
• Keeps equipment enclosures and other normal metal parts stable and therefore, safe to touch.
• Limits unintended voltage on the electrical system imposed by lightning, line surges or unintentional contact with higher-voltage lines.
• Bonds electrical equipment together to establish a low impedance path (effective ground-fault current path) from the fault location back to supply source to facilitate the operation of overcurrent devices.
• Establishes a stable voltage to ground during operation, including short circuits.
• Keeps electromagnetic interferences from causing misoperation.
• Prevents objectionable current.
The requirements for grounding and bonding begin at the service. The NEC requires the grounded conductor(s) to be routed with the ungrounded conductors to the service entrance equipment and it shall connect to the grounded conductor(s) terminal or bus. The grounded service conductor is required to be connected to a grounding electrode conductor at each service. The main bonding jumper shall connect the grounded conductor to equipment-grounding conductors and the service entrance enclosure via the grounded conductor’s terminal or bus.
The GEC shall be used to connect the EGCs, the service equipment enclosures and where the system is grounded, the grounded service conductor to the grounding electrodes. Figure 1 details the grounding system connections.
The minimum sizes of the grounded conductor, EGC and GEC are determined based on NEC Table 250.102(C)(1), Table 250.122 and Table 250.66, respectively. The sizes for the main bonding jumpers, supply side bonding jumpers and system bonding jumpers can also be sized from Table 250.102(C)(1).
Although the grounded conductor is connected on the supply side, it shall not be connected to the EGCs or reconnected to ground on the load side of the service disconnection means except as otherwise permitted in the 2017 NEC Article 250.142(B).
Common errors
There are a few errors commonly seen in design or during construction due to a lack of understanding or misconception concerning grounding, bonding and the NEC Article 250. A few commonly seen errors are:
Error 1: Using the wrong tables for EGC, grounded conductor or GEC.
The sizing methods detailed in the NEC are the minimum requirements and it may not be adequate for the scope and size of the project. Large available short-circuit currents may require larger conductor sizes than the minimum NEC requirements.
The EGC should be sized per Table 250.122. A full-sized EGC is required to prevent overloading and possible burnout of the conductor if a ground fault occurs along one of the parallel branches. The EGC is sized in accordance with Table 250.122 based on the rating of the overcurrent protective device upstream that protects the conductors routed with the EGC.
However, the sizes for EGC in Table 250.122 does not account for voltage drop. Therefore, ungrounded conductors shall be sized while taking into account the voltage drop and per 250.122(B), the EGC shall be increased in size proportionately to the upsized ungrounded conductors. For example, given a 480-volt branch feeder circuit breaker rated 150 amperes, the EGC shall be sized 6 AWG copper or 4 AWG aluminum for a voltage drop of at most 3%.
The grounded conductor at the service should be sized in accordance with Table 250.102(C)(1), based on the size of largest ungrounded conductor or equivalent area for parallel conductors. This table can also be used to size the main bonding jumper, system bonding jumper and supply-side bonding jumper for AC systems. As stated in the notes of Table 250.102(C)(1), for ungrounded conductors larger than 1,100 kcmil copper or 1,750 kcmil aluminum, the conductor shall have an area not less than 12.5% of the area of the largest ungrounded supply conductor or equivalent area for parallel supply conductors. If the ungrounded conductors are installed in parallel in two or more sets, the grounded conductor shall also be installed in parallel.
For parallel sets, the equivalent size of the largest ungrounded supply conductor(s) shall be determined by the largest sum of the areas of the corresponding conductors of each set. For example, given that the electrical service is supplied by five sets of 500 kcmil copper conductors, the grounded conductor required in each set shall be 350 kcmil copper. The total equivalent area of the parallel supply conductors in each set is 2,500 kcmil (five times 500 kcmil given five parallel ungrounded conductors). Because the equivalent area is above 1,100 kcmil for copper, the grounded conductor(s) shall have an area not less than 12.5%. This is an area of roughly 312.5 kcmil, which according to Table 8 of Chapter 9 in the 2017 NEC, is 350 kcmil copper.
The GEC should be sized per Table 250.66. The notes at the bottom of Table 250.66 needs to be considered if there are multiple service entrance conductors or no service entrance conductors. Given the number of service entrance conductors, the size is determined either by the largest ungrounded service-entrance conductor or the equivalent area for parallel conductors. The size of the GEC is also dependent on the material of the conductor and its connection to specified electrodes in Article 250.66(A) through (C). The allowed materials are copper, aluminum, copper-clad aluminum and items allowable in Article 250.68(C).
For example, given that the electrical service is supplied by one set of 500 kcmil copper conductors, the GEC per Table 250.66 shall be 1/0 AWG copper. The location for GEC installation is at the service, at each building or structure where supplied by a feeder(s) or branch circuit(s) or at a separately derived system.
To reiterate, the GEC is the connection of the system grounded conductor or the equipment to a grounding electrode or to a point on the grounding electrode system. This leads on to error No. 2, errors in the grounding electrode system, which is commonly seen in design and construction.
Error 2: Meeting only bare minimum NEC requirements for grounding electrode system that may not satisfy project scope.
The grounding electrode system is made up of grounding electrodes that are present at each building or structure served that are bonded together. The items that qualify as a grounding electrode are detailed in Article 250.52, which includes concrete-encased electrode, ground ring encircling the building or structure, rod and pipe electrodes, plate electrodes and other listed electrodes. The NEC details the minimum requirements but not necessarily the design or construction requirement that allows for a functional system depending on the project scope.
These are the commonly seen issues in grounding electrode system that follows the NEC, but does not satisfy project scope:
- Not installing a third grounding electrode. The NEC requires a minimum of two grounding electrodes, unless one electrode has a resistance to earth less than 25 ohms. However, commonly in construction, the ground resistance is not measured again after a supplemental grounding electrode is installed. Therefore, the ground resistance of 25 ohms is not confirmed as having been met. Per the NEC, two electrodes would meet code, but this doesn’t guarantee a low electrode-to-earth resistance. Including a grounding ring with multiple grounding electrodes is considered a best practice to ensure low resistance. Also, specifications should also require ground resistance measurements to be taken after grounding electrode system is installed to determine if additional electrodes are required.
- Allowing 25 ohms ground resistance because it is allowed by code.
- The NEC only requires 25 ohms ground resistance; however, the industry recognizes a lower resistance value may be more desirable. International Electrical Testing Association ATS-201313 recommends 5 ohms or less for large industrial systems.
- Installing grounding electrodes (in particular, rods) 6 feet apart because that is the minimum separation required by code.
- Each ground rod has its own zone of influence as shown in Figure 2. The optimal spacing between rods should be twice the length of the ground rod. When the zones overlap, the net resistance of each rod increase, thus making the ground system less effective.
There are many considerations that need to be taken into account when designing and installing grounding electrode systems. These are:
- Size of service.
- Types of loads that will be connected.
- Soils: the resistivity is affected by salt, moisture, temperature and depth.
While considering all of the above factors, some of the best practices seen in the industry are using ground rings around buildings, ground triangles at smaller services, exothermic welds for concealed or buried connections and ground rods and installing ground testing/inspection wells that allow easy access for ground resistance testing.
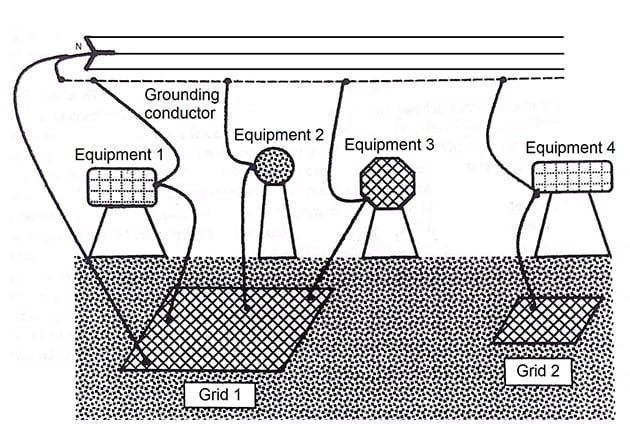
Error 3: Bonding grounded conductor (neutral) to ground bar at multiple locations.
Per Article 250.142, the neutral to ground connection is allowed on the supply side or within the enclosure of the AC service disconnecting means. This connection is also allowed at separately derived systems. If the grounded conductor is grounded again on the load side of the service, the connection between the grounded conductor and the EGC on the load side of the service places the EGC in a parallel circuit path with the grounded conductor.
Another issue that can arise out of multiple bonding locations is the risk the grounded conductor being disconnected on the line side of the service. This could cause the EGC and all conductive parts connected to it to become energized because the conductive path back to the source that would normally allow the overcurrent device to trip is not connected. In this case, the potential to ground of any exposed metal parts can be raised to line voltage, which can result in arcing and severe shock hazard.
Error 4: Grounding and bonding design for separately derived systems.
One common error in grounding and bonding design is the grounding of generators and whether a three- or four-pole automatic transfer switch is used with a four-wire power system. Grounding a separately derived system is detailed in Article 250.30. The error in grounding and bonding design for separately derived systems stems from understanding the definition of a separately derived system. As shown in Figure 3, a system is considered separately derived when the system does not have a direct electrical connection to the other supply system grounded conductor (neutral), other than through the bonding and equipment grounding conductor.
The generator also requires to be directly connected to ground when it is considered a separately derived system as shown below. If a four-pole ATS is used and the neutral is switched, the generator or secondary backup source becomes a separately derived system. It should be noted that a three-pole ATS can be used with a four-wire generator and also be considered a separately derived system if the electrical distribution system is a three-wire system. In this situation, the generator neutral would be connected to ground, but a grounded (neutral) conductor would not be brought to the ATS.
Grounding and bonding definitions
There are many requirements in NFPA 70: National Electrical Code Article 250. A common reason for confusion mainly stems from not understanding the proper definitions. Therefore, the first step to understanding Article 250 is understanding the terminology within the NEC. Below are some terms taken from the 2017 edition of NEC Article 100 and clarifications for mentioned terms.
Bonded (bonding): Connected to establish electrical continuity and conductivity. Bonding is not to be confused with grounding. Two pieces of equipment bonded together does not necessarily mean both pieces of equipment are grounded. However, it assures that the metallic parts of the bonded equipment can form an electrically conductive path for electrical continuity.
Bonding jumper, supply side: A conductor installed on the supply side of a service or within a service equipment enclosure(s) or for a separately derived system that ensures the required electrical conductivity between metal parts required to be electrically connected.
Bonding jumper, system: The connection between the grounded circuit conductor and the supply-side bonding jumper or the equipment grounding conductor or both, at a separately derived system.
Bonding conductor or jumper: A reliable conductor to ensure the required electrical conductivity between metal parts required to be electrically connected.
Bonding jumper, main: The connection between the grounded circuit conductor and the equipment grounding conductor at the service.
Effective ground-fault current path: An intentionally constructed, low-impedance electrically conductive path designed and intended to carry current under ground-fault conditions from the point of a ground fault on a wiring system to the electrical supply source and that facilitates the operation of the overcurrent protective device or ground-fault detectors. The earth is not considered as an effective ground-fault current path.
Equipment grounding conductor: The conductive path(s) that provides a ground-fault current path and connects normally noncurrent-carrying metal parts of equipment together and to the system grounded conductor or to the grounding electrode conductor or both.
Ground: The earth.
Grounded conductor: A system or circuit conductor that is intentionally grounded (I.e., neutral conductor).
Grounding electrode: A conducting object through which a direct connection to earth is established. Common grounding electrodes include rods, plates, pipes, ground rings, metal in-ground support structures and concrete-encased electrodes. All grounding electrodes at each building or structure shall be bonded together to form the grounding electrode system.
Grounding electrode conductor: A conductor used to connect the system grounded conductor or the equipment to a grounding electrode or to a point on the grounding electrode system.
Ground-fault current path: An electrically conductive path from the point of a ground fault on a wiring system through normally noncurrent-carrying conductors, equipment or the earth to the electrical supply source. Examples of ground-fault current paths are any combination of equipment grounding conductors, metallic raceways and electrical equipment.
Grounded (grounding): Connected (connecting) to ground or to a conductive body that extends the ground connection. Grounding is not to be confused with bonding. Equipment may be bonded together, but it is not considered grounded unless it is connected back to the ground.
Grounded, solidly: Connected to ground without inserting any resistor or impedance device.
Neutral conductor: The conductor connected to the neutral point of a system that is intended to carry current under normal conditions.
Neutral point: The common point on a wye-connection in a polyphase system or midpoint on a single-phase, three-wire system or midpoint of a single-phase portion of a three-phase delta system or a midpoint of a three-wire, direct-current system.
Service: The conductors and equipment for delivering electric energy from the serving utility to the wiring system of the premises served.
Service equipment: The necessary equipment, usually consisting of a circuit breaker or switch and fuses and their accessories, located near the point of entrance of supply conductors to a building or other structure or an otherwise defined area and intended to constitute the main control and means of cutoff of the supply.
Authors: Joe Doughney is an electrical engineer with CDM Smith, where he focuses on design and analysis of electrical power systems. Lilly Vang is an electrical engineer with CDM Smith. She focuses on electrical power system design and power system studies.
Source URL: https://www.csemag.com/articles/electrical-grounding-and-bonding-per-nec/