Published by Md. Mainul ISLAM1, Hussain SHAREEF2, Azah MOHAMED1
Universiti Kebangsaan Malaysia (1), TNB Research Sdn. Bhd (2)
Abstract. Fossil fuel depletion and greenhouse gas emission from the burning of fossil fuels motivates policymakers to find an alternative road transport system. Electric vehicles (EVs) are considered as one of the best solutions in road transportation system as EVs can reduce the dependence on fossil fuel and diminish transportation-related emissions from carbon dioxide emission and other pollutants. The key issue in this system is recharging the EV batteries before they are exhausted. Thus, charging stations (CS) should be carefully located to ensure that EV users can access the stations within their driving range. This study represents a survey of the literature focused on the numerous optimization techniques employed from the last decade to determine the optimal EVCS placement and sizing problems.
Streszczenie. Zasadniczym problemem w rozwoju pojazdów elektrycznych jest zapewnienie nich naładowania przed pełnym rozładowaniem. Dlatego równie ważnym zagadnieniem jest właściwe rozplanowanie lokalizacji stacji ładowania. W artykule analizowane są różne techniki optymalizacji lokalizacji jak i wielkości stacji. Przegląd technik optymalnej lokalizacji stacji ładowania pojazdów elektrycznych
Keywords: electric vehicle, placement, sizing, optimization techniques
Słowa kluczowe: pojazdy elektryczne, stacje ładowania
Introduction
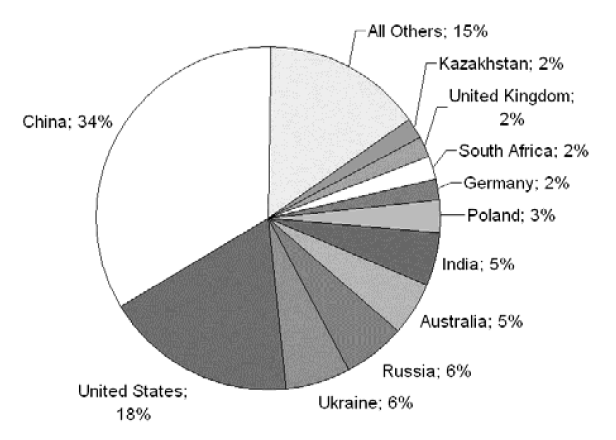
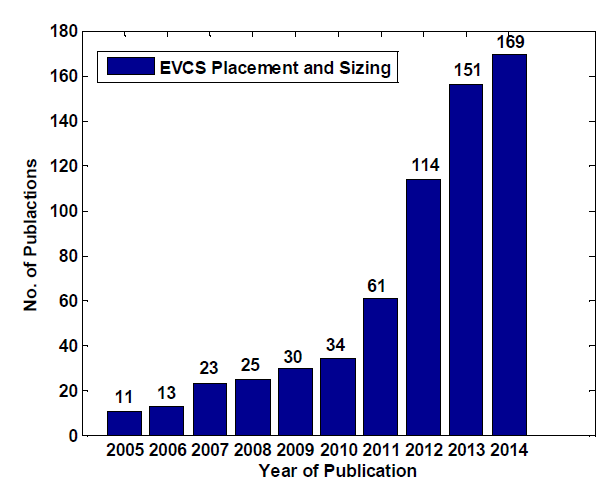
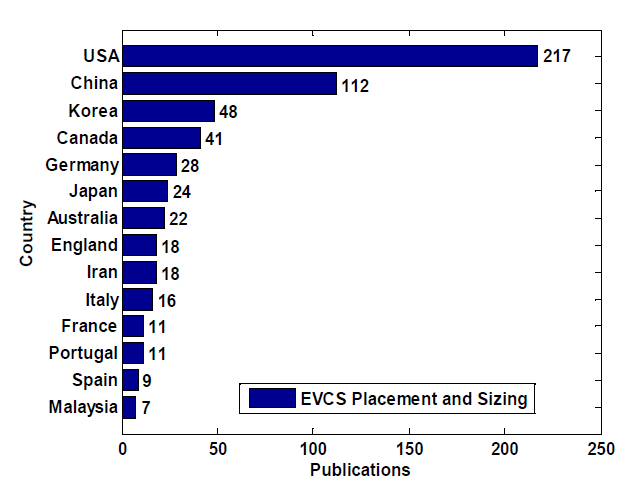
Recently, the global community realized that the planet is harmed by the effects of global warming and various problems that the lack of care causes. Internal combustion engine (ICE) is considered as one of the most important components in the transportation sector for creating such problems through carbon dioxide (CO2) emissions, which is the main perpetrator of global warming. Fossil fuel depletion is another concern in the transportation system [1]. Interestingly, an electric vehicle (EV) does not contaminate the earth or contribute to the problems of high oil price. EVs are a forthcoming technology that has numerous benefits in the transportation sector. Nonetheless, the inappropriate placement of EV charging stations (EVCS) could have adverse effects on the public acceptance of EVs, the layout of the traffic network, and the convenience of EV drivers [2]. Many studies are being conducted all over the world in light of the development of EVs. The aim of the current study is to represent a comprehensive review of optimal EVCS placement and sizing problems. For this purpose, a literature survey was conducted using the JCR database. The survey spans the years 2005 to 2014. Fig. 1 demonstrates the number of published papers on optimal EVCS placement and sizing problems. The figure shows that the research on EVs are growing rapidly. Fig. 2 illustrates the research intensity according to each country in the abovementioned research area from 2005 to 2014.
EVCS is an element in an infrastructure that supplies electrical energy to recharge EV batteries. Appropriate site selection and sizing of EVCS is important to reduce the adverse effects on EVs. Various studies have been conducted on the optimal placement and sizing of EVCS. These studies can be divided into two focus areas: economics and power-grid-related concepts. However, deciding on the placement and sizing of EVCS by considering only the economic benefits are not reasonable and practical. Therefore, the ultimate goal is to determine an optimal location and sizing of EVCS through utilizing an optimization technique that can minimize total cost while maintaining power system security. Various heuristic optimization algorithms were recently utilized to solve the location and sizing problems of EVCS. The benefit of the heuristic algorithm is the ability to find a global or near global optimum solution even though the problem is complex [3]. Other techniques have also been explored for the same purpose. The following sections provide a detailed review of various EVCS placement methods.
Optimal EVCS Placement Considering Only Economic Benefits
EVCS methods that only consider economic benefits incorporate various cost functions, such as land, fixed, construction, operating, and transportation costs for siting and sizing EVCS. Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Integer Programming (IP), and Cplex commercial software are widely applied for EVCS optimization, as detailed below.
Genetic Algorithm (GA)
GA is an evolutionary algorithm that obtains a solution to optimization problems that utilize techniques motivated through natural evolution, such as inheritance, selection, mutation, and crossover. The benefit of GA is the ability to search and determine a global optimal solution within the optimization process [4]. To solve optimal EVCS siting and sizing problems using GA, Ge et al. [5] proposed an EVCS placement method for existing city traffic networks. This method is based on a grid partition that minimizes transportation cost using GA to access a charging station (CS). The method considers traffic density and station capacity as constraints. However the cost function, which includes land, fixed, and operating costs, does not consider optimizing the system; thus, the outcome is not a global optimal solution. Mehar et al. [6] introduced a model that considers investment and transportation cost to find optimal locations. The model was solved using an improved GA. Moreover, Li et al. [7] developed a cost model that predicts the total number and distribution of EVs. Conversation theory was demonstrated based on regional traffic flows that consider the EVs within each district as a fixed load point of CSs. Finally, GA was applied to optimize the model. For the same purpose, Kameda and Mukai [8] developed an optimization routine to locate CS depending on taxi data and focusing on the on-demand local bus transportation system. GA was again proposed for an on-demand bus transportation system to optimize the route. The result was mainly based on computer simulation without the justification of a practical network. By contrast, Bendiabdellah et al. [9] and You and Hsieh [10] employed hybrid GA (HGA) to determine the optimal number and size of public CSs. This algorithm finds the best location by minimizing the investment and traveling cost. Other costs, such as operating and charging costs, were not considered for optimizing the system. Similar to a previous study, the investment and traveling costs are minimized in [11]. In this research, the authors proposed a multi-objective optimization model with hard time window constraints to find the optimal layout and scale of CSs. The model was solved using a two-stage heuristic algorithm. The authors demonstrated that the layout of EVCS is obtained based on the charging demand of various locations and the charging time constraints. In comparison, the scale of CSs is interrelated to the number of EVs, layout of CSs, and charging duration at peak hours. However, in finding the optimal location and sizing of EVCS, GA was observed to require long computational time. Another disadvantage is premature convergence.
Particle Swarm Optimization (PSO)
PSO relies on the simulation of social behavior among the particles flying through a problem space, in which an individual particle represents a solution to the given problem. The benefit of PSO is its ability to obtain the global optimal solution with higher possibility and efficiency compared with other optimization methods. Unlike GA, PSO is easy to implement and achieves faster convergence because evolution operators, such as crossover and mutation, are absent [12]. For instance, Zi-fa et al. [13] utilized PSO to declare an optimal location of CS based on construction cost (e.g., land price) and running cost by considering geographic information and traffic flow as constraint conditions. A PSO algorithm that was improved through changing the inertia factor was then applied on existing CS, and the results were compared. Similarly, Tang et al. [14] represented an optimal planning model of EVCS that incorporates the global searching ability of PSO and a weighted Voronoi diagram. First, the defined area was partitioned using the weighted Voronoi diagram, and then PSO was employed to determine the best locations. For the above cases, the authors did not discuss CS sizing. However, the main shortcomings of PSO are low precision and easy divergence. Thus, the provided solutions of EVCS may be non-optimal.
Integer Programming (IP)
IP is a mathematical optimization program where some or all of the variables are defined as integers. A linear IP is a term, in which the objective functions and the constraints are of a linear nature. On the contrary, the term “mixed integer programming” is used when some variables are restricted to an integer. To find the optimal set of routes and CS locations, Worley et al. [15] designed an IP model. The objective of this model was to minimize the total transportation, charging, and CS placement costs. Andrews et al. [16] developed the mixed IP model to find the CS infrastructure indispensable for diminishing range anxiety and enhancing EV integration through reducing the traveling distance to CS. The model was implemented for the Chicago and Seattle regions. The results show that user convenience increases promptly as the number of CSs increases. In the present work, only traveling distance from EV to selected CS was minimized. Furthermore, Kockelman et al. [17] utilized mixed IP to optimize the EVCS placement problem as a function of parking demand and user traveling costs to access the CS. Parking demand was predicted based on site accessibility, local jobs and population densities, trip attributes, and other approaches. This method only identifies optimal zones for CS placement, but specific CSs within recognized zones are not determined. For the same intention, Ip et al. [18] introduced a two-step model, in which the first step congregates the road information into “demand clusters” through hierarchical clustering analysis. Linear programming was then employed to conduct the site planning, which considers certain constraints and cost factors. Linear programming did not consider traveling cost on the way to the CS. In Meng and Kai [19], the EVCS placement problem was modeled following game theory and was later transformed into a linear programming model. Finally, the model was solved using a primal-dual path following algorithm to make the process simple and clear with strong viability. Overall, important factors, such as traffic flow, road network, structure, and capacity constraints of the distribution network, were not considered during problem modeling. The shortcoming of IP is that it cannot solve the stochastic problems related to EVCS.
Cplex Commercial Software
Cplex is a commercial optimization software package used to solve integer (linear) programming problems that utilize either primal or dual variants of the simplex method or the barrier interior point method. Cplex can also solve convex and non-convex quadratic constrained programming problems. Chung and Kwong [20] used Cplex software to propose a multi-period flow-refueling location model according to city construction plan stages to provide an overall optimal location for the stations. In this work, the authors only highlighted location problems. In a related work, Jia et al. [21] modeled the transportation network with graph theory to find the shortest distance from vehicle location to allocated CS. This model also optimizes the station size at each location based on charging demand.
The established model was solved using Cplex, which minimizes the overall cost. However, only one main road was conceived from one district to another district that may be speculative to EV users searching for the CS location. Again, Jia et al. [22] proposed a model that combines slow and fast-charging modes for the siting and sizing of EVCS. Charging piles are planned for slow-charging areas, whereas fast CSs that are built along the roadsides rely on fast-charging demand distribution and road network structure. P-center location and allocation model was also demonstrated to lessen the investment and charging costs. Finally, Cplex was utilized to solve the problem. Nonetheless, the disadvantage of commercial software is that the users cannot modify the parameters of the software.
Other Techniques
Other techniques are also used to find the optimal location and sizing of EVCS. Rastegarfar et al. [23] established a cost model with reference to total investment and operation cost. The model considers geographic conditions, traffic, and local access to find the optimal locations. A computer program was developed in MATLAB to calculate the costs and optimum combination of CS. In addition, Lam et al. [24] minimized the total construction cost based on user convenience and station coverage for CS placement. An efficient greedy algorithm that relies on the properties of the problem, especially its nondeterministic polynomial-time hardness, was developed. The weakness of this method is that the obtained solutions are usually sub-optimal. In Zambrano et al. [25], flow capturing methodologies were employed to find the optimal locations of CSs. First, the methodology follows the classical flow-capturing location-allocation model (FCLM) to maximize the traffic flow that would be captured using CS. Advanced FCLM is then used to minimize the setup costs of CSs. For the same reason, traffic flow was maximized in [26]. In this work, the authors proposed an extended flow refueling location model to obtain the optimal location of CS and charging pad, which uses inductive charging technology. However, the proposed model was restricted to handling a small-scale network.
Meanwhile, Wirges et al. [27] introduced time-spatial models for the development of EV charging infrastructure in the metropolitan region of Stuttgart, Germany; the models relied on socio-demographics, land use, and mobility. The simulation results determined the number of public CSs required to provide good service for that region, which is relatively small. However, a public charging infrastructure was basically cost-effective in dense municipal areas. Similarly, Wu et al. proposed the development model of EVCS in [28]. This model was based on three stages, including demonstration, public promotion, and commercial utilization. An optimization model for the planning of EVCS was suggested taken into consideration the interval distance ratio, charge capacity, and charging power redundancy. However, this model did not research further on the sizing of EVCS.
Wang et al. [29] represented a multi-objective expandable planning model for EVCS that considers the feasible improvement of EVs, features of CS, EV manners of the user, distribution of charging demand, and community planning. In addition, an algorithm process was designed, which depended on the demand preference and re-use of gas stations. Shaoyun et al. [30] also adduced an EVCS planning model for an urban area; the model considered the road network, traffic information, structure and capacity, and constraints of distribution networks. First, the service area was divided by the weighted Voronoi diagram, such as in [14], and then the principle of queuing theory was applied to optimize the capacity of CS. The proposed model minimizes the traveling and investment cost of CS. In a similar work, Frade et al. [1] presented a facility location model based on the maximization of demand coverage to optimize the demand, which distinguishes between night and day time EV demands. This study also emphasized population (households) and employment (jobs) for optimal locations. These CSs locations are only suitable for the slow-charging mode. Eisel et al. [31] also established a location-planning model to assign the EVCS under the unique consideration of user preference to diminish range anxiety.
However, Sweda and Klabjan [32] utilized an agentbased decision technique to recognize the EV ownership patterns and driving activities in the residential area of Chicagoland to find the optimal location of EVCSs. This method considers a fixed plan for CS placement without any dynamic or iterative modification or optimization. He et al. [33] also represented a model to study the interactions among the availability of public charging opportunities, price of electricity, destination, and route choices of PHEV at local transportation and power networks. Later, active-set algorithm was applied to determine the best allocation of a given number of CSs among cosmopolitan areas to maximize the social welfare. Different factors, such as charging demands, the performance and charging period of a battery, the way of energy supply and locations, and CS environment, have significant effects on the layout of EVCSs, as demonstrated in [34]. However, a mathematical model for the layout of the CS has yet to be presented.
EVCS Placement Considering Power Grid Impact
EVCS placement methods with grid impact include different power system issues and various cost functions to find the optimal location and sizing of EVCS. Similar to the methods that consider only economic benefits, the overview of optimal EVCS placement and sizing problems that consider power grid issues based on different optimization techniques are represented as below.
Genetic Algorithm (GA)
Numerous authors consider GA as an optimizer for the EVCS sizing and siting problem. To solve the optimal sizing problem, GA was proposed in [35], where the authors suggested an optimal sizing model of C-s in relation to power loss and voltage drops. Traffic and distribution networks were also considered to find the best location for CSs. However, the model is not so realistic because the cost parameters are not considered while designing the model. At the same time, Yan et al. [36] proposed a multi-objective, multivariate optimal planning model in terms of investment costs and feeder energy losses with other constraint conditions. The proposed approach was tested on the IEEE 33 node distribution system using HGA and was compared with traditional GA. The study determined that HGA successfully solves the difficulties of blind search and low efficiency in the basic GA.
Particle Swarm Optimization (PSO)
To find the locations and capacities of EVCS for regional EVs, Kou et al. [37] proposed a cost model based on the operating costs of CS, network losses, and investment costs of the distribution transformer. This model comprises various constraints, such as distance between substation and EV location, installed costs of EVCS, and number of EVs. PSO was utilized to optimize the system. However, the forecasting of charging demand was not considered in optimizing the model. Nonetheless, Prasomthong et al. [38] used PSO with a time-varying coefficient for V2G CS placement and sizing in the distribution grid at peak period. The simulation results indicated that V2G CS maximizes the total benefits comprising power loss diminution, peak power saving, and reliability enhancement when maintaining the system operating constraints.
Ant Colony Optimization (ACO)
Another heuristic optimization method used to evaluate optimal EVCS placement is ant colony optimization (ACO). For instance, Phonrattanasak and Nopbhorn [39, 40] found an optimal location of EVCS on the distribution grid by minimizing total costs and real power loss while maintaining power system security and traffic flow as constraints. ACO was used to find the best location of CS on the existing distribution grid. In a related work, Dharmakeerthi et al. [41] developed an EV model that combines constant power and voltage-dependent load to find the best locations in a power grid based on voltage-stability margins, grid power loss, and cable flow ratings. The weakness of this technique is that it is slow compared with other optimization techniques.
Other Techniques
Besides heuristic techniques, other methods are also used to solve EVCS placement and sizing problems. For instance, Liu et al. [2] obtained the optimal CS sites based on environment factors and maximum coverage of service, as well as developed a cost function that is associated with power system loss cost to obtain optimal sizing of the CSs.
Modified primal-dual interior point algorithm was adopted to solve the problem. Meanwhile, Wang et al. [42] introduced a traffic constrained polyobjective pattern, which considers the traffic system in addition to power loss for optimal CS placement. This pattern utilized data-employment analysis to ascertain the best candidate solution and cross-entropy algorithm to determine the optimization problem. These techniques effectively reduced power loss, voltage deviation, and travel distance to the CS. Masoum et al. [43] designed a new smart load management control scheme based on peak demand shaving, voltage profile improvement, and power loss minimization to coordinate multiple EV chargers while considering daily residential load patterns. Again, Shaoyun et al. [44] proposed a model of EVCS for new city traffic network in relation to construction, operation, maintenance, and power loss costs. The allocations of CSs were optimized using queuing theory to minimize the transportation wastage cost. The planning model is not realistic for existing city road structures.
Although all of the abovementioned techniques can find the optimal location and sizing of EVCS, a comprehensive study is still required to enhance the performance. Table 1 summarizes the benefits and disadvantages of the various optimization techniques used to solve the EVCS placement and sizing problems.
Table 1. Comparison of different optimization techniques in EVCS siting and sizing schemes.

Conclusion
This paper presents a comprehensive review of literature on optimal EVCS placement and sizing problems. Various optimization techniques that tackled the EVCS placement and sizing problems are outlined and critically discussed with their benefits and disadvantages. Some noteworthy works have already been conducted in the above areas, but many issues are still left for further research. Therefore, this work will help provide the most relevant and significant information about the existing studies. Optimal EVCS placement and sizing problems over the last decades can also be reviewed through the annotated bibliographies for the convenience of the reader and for a broad spectrum.
REFERENCES
[1] Frade I., Ribeiro A., Gonçalves G., Antunes A.P., Optimal location of charging stations for electric vehicles in a neighbourhood in Lisbon, Portugal, Transportation research board of the national academies, Washington, D.C, (2011), 91-98.
[2] Liu Z., Wen F., Ledwich G., Optimal planning of electric-vehicle charging stations in distribution systems, IEEE Trans. Power Deliv., 28(2013), No.1, 102-110.
[3] Mosaad M.I., Metwally M.M.EI., Emary A.A.EI., Bendary F.M.EI.,On-Line optimal power flow using evolutionary programming techniques, Int. J. Sci. Tec., 15(2010), No.1,20-28.
[4] Mardle S., Pascoe S., An overview of genetic algorithms for the solution of optimization process, Computers in Higher Education Economics Rev., 13(1999), No.1, 16-20.
[5] Ge S., Feng L., Liu H., The planning of electric vehicle charging station based on grid partition method, IEEE electrical and control engineering conference, China, (2011), 2726-2730.
[6] Mehar S., Senouci S.M., An Optimization location scheme for electric charging stations, International Conference on Smart Communications in Network Technologies (SaCoNeT), Paris, (2013),1-5.
[7] Li Y., Li L., Yong J., Yao Y., Li Z., Layout planning of electrical vehicle charging Stations based on genetic algorithm, Lecture Notes in Electrical Engineering, 99 (1), Electrical Power Systems and Computers, (2011), 661-668.
[8] Kameda H., Mukai N., Optimization of charging station placement by using taxi probe data for on-demand electrical bus system, Lectures Notes Comput. Sci., (2011), 606-615.
[9] Bendiabdellah Z., Senouci S.M., Feham M., A hybrid algorithm for planning public charging stations, Global Information Infrastructure and Networking Symposium (GIIS), Montreal, QC, (2014),1-3.
[10] You P.S., Hsieh Y.C., A hybrid heuristic approach to the problem of the location of vehicle charging stations, Comput. Ind. Eng., 70(2014),195–204.
[11] Yan L., Optimal layout and scale of charging stations for electric vehicles, CIRED Workshop – Rome, (2014),1-5.
[12] Rini D.P., Shamsuddin S.M., Yuhaniz S.S., Particle swarm optimization: Technique, system and challenges, Int. J. Comput. Appl. 14(2011), No. 1, 19-27.
[13] Zi-fa L., Wei Z., Xing J., Ke L., Optimal planning of charging station for electric vehicle based on particle swarm optimization, IEEE Innovative Smart Grid Technologies-Asia, Tianjin, China, (2012), 1-5.
[14] Tang X., Liu J., Wang X., Xiong J., Electric vehicle charging station planning based on weighted voronoi diagram, International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, (2011),1297-1300.
[15] Worley O., Klabjan D., Sweda T., Simultaneous vehicle routing and charging station siting for commercial electric vehicles, IEEE International Electric Vehicle Conference, Greenville, (2012),1-3.
[16] Andrews M., Dogru M.K., Hobby J.D., Jin Y., Tucci H., Modeling and Optimization for electric vehicle charging infrastructure, IEEE Innovative Smart Grid Technologies Conference, 2013.
[17] Kockelman K.M., Chen T.D., Khan M., The electric vehicle charging station location problem: a parking-based assignment method for Seattle, Proceedings of the 92nd
Annual Meeting of the Transportation Research Board in Washington DC, 2013.
[18] Ip A., Fong S., Liu E., Optimization for allocating BEV recharging stations in urban areas by using hierarchical clustering, The 2nd International Conference on Data Mining and Intelligent Information Technology Applications (ICMIA), Seoul, Korea, (2010), 460-465.
[19] Meng W., Kai L., Optimization of electric vehicle charging station location based on game theory, International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), (2011), 809-812.
[20] Chung S.H., Kwon C., Multi-period planning for electric-car charging stations locations: A case of Korean expressways, (2012),1-31.
[21] Jia L., Hu Z., Song Y., Luo Z., Optimal sitting and sizing of electric vehicle charging stations, IEEE International Electric Vehicle Conference (IEVC), Beijing, China, (2012), 1-6.
[22] Jia L., Hu Z., Liang W., Tang W., Song Y., A novel approach for urban electric vehicle charging facility planning considering combination of slow and fast charging, International Conference on Power System Technology (POWERCON), Chengdu, (2014), 3354-3360.
[23] Rastegarfar N., Kashanizadeh B., Vakilian M., Barband S., Optimal placement of fast charging station in a typical microgrid in Iran, 10th International Conference on the European Energy Market (EEM), Stockholm, (2013),1-7.
[24] Lam A.Y.S., Leung Y., Chu X., Electric vehicle charging station placement, IEEE International Smart Grid Communications, Vancouver, BC, (2013), 510-515.
[25] Zambrano M.C., Corchero C., Igualada-Gonzalez L., Bernardo V., Optimal location of fast charging stations in barcelona: A flow-capturing approach, 10th International Conference on the European Energy Market (EEM), Stockholm, (2013),1-6.
[26] Siting C., Hongyang Li., Klara N., Charging Facility Planning for Electric Vehicles, IEEE International Electrical Vehicle Conference, Florence, (2014),1-7.
[27] Wirges J., Linder S., Kessler A., Modelling the development of a regional charging infrastructure for electric vehicles in time and space, Eur. J. Transp. Infrastruct. Res., 12(2012),391–416.
[28] Chunyang W., Canbing LI., Li Du., Yijia C., A method for electric vehicle charging infrastructure planning, Automation Electr. Power. Syst., 34(2010), No. 24, 36–39.
[29] Wang H., Huang Q., Zhang C., Xia A., A novel approach for the layout of electric vehicle charging station, International Conference on Apperceiving Computing and Intelligence Analysis (ICACIA), Chengdu, (2010), 64-70.
[30] Shaoyun G., Liang F., Hong L., Planning of charging stations considering traffic flow and capacity constraints of distribution network, Power. Syst. Technol., 37(2013), No. 3, 582-589.
[31] Eisel M., Schmidt J., Kolbe L.M., Finding suitable locations for charging stations: implementation of customers’ preferences in an allocation problem, IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, (2014),1-8.
[32] Sweda T., Klabjan D., An agent-based decision support system for electric vehicle charging infrastructure deployment, 7th IEEE Vehicle Power and Propulsion Conference, Chicago, Illinois, (2011),1-5.
[33] He F., Wu D., Yin Y., Guan Y., Optimal deployment of public charging stations for plug-in hybrid electric vehicles, Transp. Res. Part B: Methodological, 47(2013),87-101.
[34] Fan X., Guo-Qin Y., Lin-Feng G., Zhang H., Tentative analysis of layout of electrical vehicle charging stations, East China Electr. Power., 37( 2009),No. 10,1677–1682.
[35] Pazouki S., Mohsenzadeh A., Haghifam M.A., Optimal planning of PEVs charging stations and demand response programs considering distribution and traffic networks, Smart Grid Conference (SGC), Tehran, Iran, (2013), 90-95.
[36] Yan X., Duan C., Chen X., Duan Z., Planning of electric vehicle charging station based on hierarchic genetic algorithm, Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), IEEE Conference and Expo, Beijing, (2014),1-5.
[37] Kou L.F., Liu Z.F., Zhou H., Modeling algorithm of charging station planning for regional electric vehicle, Modern Electr. Power, 27(2010), No. 4, 44–48.
[38] Prasomthong J., Ongsakul W., Meyer J., Optimal placement of vehicle- to-grid charging station in distribution system using particle swarm optimization with time varying acceleration coefficient, International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE), Pattaya, (2014),1-8.
[39] Phonrattanasak P., Nopbhorn L., Optimal location of fast charging station on residential distribution grid, Int. J. Innov. Manag. Technol., 3(2012),675–681.
[40] Phonrattanasak P., Nopbhorn L., Optimal placement of EV fast charging stations considering the impact of electrical distribution and traffic condition, International Conference on and Utility Exhibition on Green Energy for Sustainable Development (ICVE), Pattaya, (2014), 1-6.
[41] Dharmakeerthi C.H., Mithulananthan N., Saha T.K., Modelling and planning of EV fast charging station in power grid, Power and Energy Society General Meeting, IEEE, San Diego, CA, (2012),1-8.
[42] Wang G., Xu Z., Wen F., Wong K.P., Traffic-constrained multiobjective planning of electric vehicle charging stations, IEEE Trans. Power. Deliv., 28(2013), 2363–2372.
[43] Masoum A.S., Deilami S., Moses P.S., Abu-Siada A., Smart load management of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimization considering voltage regulation, IET Gener. Transm. Distrib., 5(2011), N0. 8, 877-888.
[44] Shaoyun G., Liang F., Hong L., Long W., The planning of electric vehicle charging station in urban area, Electric & Mechanical Engineering and Information Technology (EMEIT) Conference, (2012),1598-1604.
[45] Nyns K.C., Haesen E., Driesen J., The impact of charging plug-in hybrid electric vehicles on a residential distribution grid, IEEE Trans. Power Syst., 25(2010), No.1, 371-380.
Authors: Md. Mainul Islam, Department of Electrical, Electronic and Systems Engineering, Universiti Kebangsaan Malaysia, 43600, Selangor, Malaysia. Email: mhsm.eee@gmail.com
Dr. Hussain Shareef, TNB Research Sdn. Bhd, No.1, Lorong Ayer Hitam, Kawasan Institusi Penyelidikan,43000 Kajang, Selangor, Malaysia. Email: hussain.shareef@tnbr.com.my.
Prof. Dr. Azah Mohamed, Department of Electrical, Electronics and Systems Engineering, Universiti Kebangsaan Malaysia, 43600, Selangor, Malaysia, Email: azah@eng.ukm.my
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 91 NR 8/2015. doi:10.15199/48.2015.08.29