Published by Ikhlas KITTA, Salama MANJANG, Ida RACHMANIAR, Faris MARICAR
Electrical Engineering Department, Hasanuddin University, Indonesia
Abstract. Electricity losses are very dependent on electric current and loss of the corona phenomenon. It is very clear that losses depend on network parameters, load behaviors and climatic factors. South Sulawesi is a tropical climate. This sector must be resistant to exposure to various factors of high tropical climate such as temperatures of 23.4⁰C – 33.3⁰C, sun irradiation that occurs more than 12 hours per day, relative humidity close to 100%, and average rainfall between 440-1322 mm . This climate factors will simultaneously transmit the transmission. This text aims to connect climate factors to achieve power losses on 275 kV transmission line in South Sulawesi. The results of this study found that temperature and duration of sun irradiation affected corona power losses on 275 kV transmission line in South Sulawesi.
Streszczenie. Straty elektryczne są bardzo zależne od prądu elektrycznego i zjawiska korony. Oczywiste jest, że straty zależą od parametrów sieci, obciążenia i czynników klimatycznych. South Sulawesi to tropikalny klimat. Sektor ten musi być odporny na działanie różnych czynników tropikalnych, takich jak temperatura 23C – 33C, promieniowanie słoneczne, które występuje więcej niż 12 godzin dziennie, wilgotność względna bliska 100%, a średnie opady wynoszą 440-1322 mm. Niniejszy artykułma na celu analizę czynników klimatycznych w celu uzyskania strat mocy na liniach przesyłowych 275 kV w Południowym Sulawesi. Wyniki adania pokazały, że temperatura i czas trwania promieniowania słonecznego wpłynęły na straty energii z wyładowań koronowych. Wpływ klimatu tropikalnego na straty mocy koronowej na liniach przesyłowych 275 kV w South Sulawesi.
Keywords: tropical climate, corona loss, transmission lines, South Sulawesi
Słowa kluczowe: klimat tropikalny, strata koronowa, linie transmisyjne, South Sulawesi
Introduction
The power system consists of generating units, transmission lines and distribution networks. The transmission network is considered as the backbone of the electric power system that connecting the power plant center with the load center. In general, the transmission line carries an electric current that reach hundreds of kilometers. The entire transmission system is interrelated due to economic reasons, security and reliability which is a transmission line requirement based on system planning [1]. Every time the generating unit is added to the system, there is a need for a transmission line to transfer power from the generating station to the load center. But the longer the transmission line is used, the greater the electrical power losses in the transmission line so that the electrical power that reaches the destination has been reduced which causes the transmission line efficiency to be low and the transmission line voltage regulation becomes high. To avoid this, the option is to increase the voltage on the transmission line from high voltage level to extra high voltage.
Therefore, one of the efforts to reduce electric power losses and improve the quality of stress in the province of South Sulawesi, one of the provinces in the country of Indonesia, or often called the South Sulawesi system, is insertion of 275 kV transmission network. In addition to these reasons, the application of the 275 kV transmission line is to connect power plants in the area of renewable electricity to the load center in South Sulawesi, namely the City of Makassar (the capital of South Sulawesi province). South Sulawesi has many primary energy sources, especially in the form of hydropower which can be developed into hydroelectric power plant. Hydropower potential that can be developed into around 1996 MW [2].
Indonesian, especially South Sulawesi, is on the equator line having a tropical climate, precisely the wet tropical climate. This is also influenced by the shape of the Indonesia condition which is an archipelago. Most of the land in Indonesia is surrounded by oceans. That is why Indonesia has a climate of sea that is moist and has a lot of rains.
The geographical location of South Sulawesi makes this area vulnerable to natural and environmental disasters, which drastically affect the transmission network in the area. The northern part of the area is hilly and mountainous, while the southern part is low land which has a tropical climate with high humidity and rainfall. The consequence is the occurrence of corona power losses (Pc) in the transmission network conductor [3], especially when applied extra high voltage on the network that is 275 kV voltage.
The conditions that affect corona power losses are air movement, air temperature and humidity [4]. Atmospheric influences affect greatly the corona losses [5].The ionization process will stop if the electric field decreases. The effects of corona power losses are noise interference, frequency interference, interference with electronic equipment performance [6].
South Sulawesi is a tropical region, so the use of transmission networks for the distribution of electrical energy must be resistant to exposure to various factors of high-intensity tropical climates such as ultraviolet radiation from the sun about 12 hours during the day, air temperatures between 16-35 °C, relative humidity approaching 100% between early morning and early morning and high annual rainfall between 40-1000 mm. These factors will simultaneously hit the 275 kV transmission line, so that through this paper an explanation of the influence of tropical climate climatological parameters on corona power losses on 275 kV transmission line in South Sulawesi is explained.
Object Analysis
The case that we analyzed in this study is the South Sulawesi electricity system which is devoted to 275 kV transmission line with ACSR type (Gannet) for about 195 kmc. The location of the 275 kV transmission line is shown in Fig.1, where the base of the transmission line is in Palopo city, and the end point is in Makassar city.
Climatology Conditions of South Sulawesi
The transmission line in the South Sulawesi power system has a voltage of 150 kV and 275 kV which already exceeds 1000 kmc. This South Sulawesi system is strongly influenced by Indonesian tropical climate conditions. The northern part is a mountainous area that contains tropical rain forest which is a source of water that flows through a network of rivers and creeks. This northern part is a potential place for renewable energy for hydro power plant. In the central part there is a vast plain for agriculture that has strong wind potential so it has been used as a wind power plant for 70 MW. Furthermore, in the southern part which is a mangrove forest tropical climate with high humidity and rain falls throughout the day. This southern part is the center of South Sulawesi community activities, in Makassar city. Part of transmission network is located in the South region. This area experiences low humidity and rainfall because it is located on the seafront, so it is affected by water vapor from the sea. The Northern Region is dominated by tropical forests with high humidity and rainfall. Air in South Sulawesi both in the north and south is not a perfect insulator, because air contains electrons and ions as a result of various effects such as solar ultraviolet light and sea water evaporation.
The province of South Sulawesi is in the equatorial region which is affected by tropical climates, where the characteristics of the tropical climate is: The temperature is quite high every year, the average air temperature is not less than 18 °C or around 27 °C, during the rainy season or dry season there is no difference that is very far or almost the same, day and night duration looks almost the same, that is around 12 hours a day and about 12 hours a night.
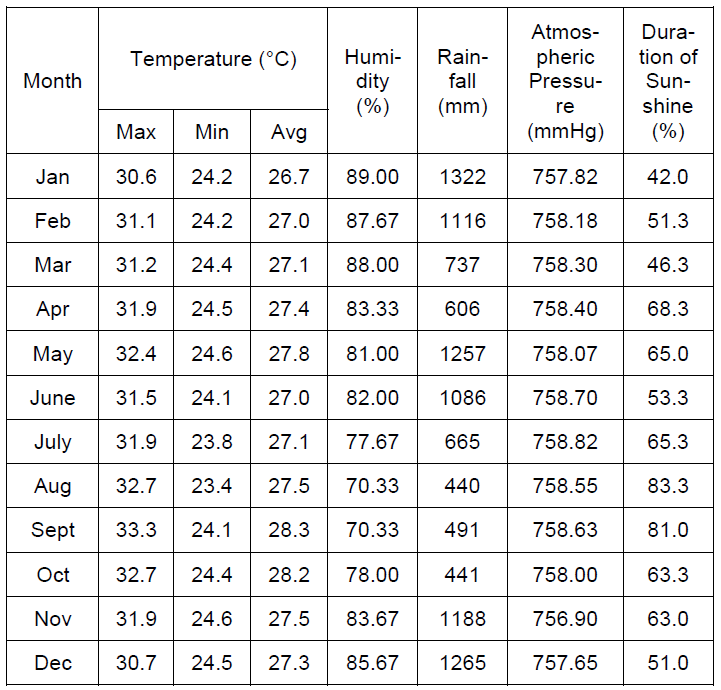
South Sulawesi is a part of Sulawesi Island with an astronomical location in South Sulawesi located at 0 on 12′ South Latitude to 8⁰ North Latitude, and 116⁰ 48′ West Longitude up to 122⁰ 36′ East Longitude. The climate in South Sulawesi is recorded in the South Sulawesi Climatology Station that the temperature throughout 2017 ranges from 23.4 ⁰C – 33.3 ⁰C and the average rainfall is 440 mm to 1322 mm per year. There is significant rainfall in most months of the year. The climatological data are shown in Table 1.
Table 1. Climatology Data of South Sulawesi in 2017 [7]
Analysis Model
In this study, the procedures carried out are:
1) The preparation phase, which is the estimation of what component structure will be used to modeling the corona power losses in the South Sulawesi transmission system.
2) Literature study by studying the literature on modeling loss corona power loss, corona effect on power losses in the transmission system, and also the influence of tropical climate on the large corona power losses that occur in a transmission system.
And 3) Data collection.
Basically, power losses in the transmission network result from transmission lines and transformers at the substation. Transformer loss is the amount of losses in the winding and core losses which are expressed in the form of hysteresis and eddy currents [8]. These losses are released in the form of heat energy. The power losses of the transmission line are very dependent on the magnitude of the network electric current and the losses of the corona phenomenon. In addition, the power losses of the transmission line are affected by changes in the configuration of the electrical system because of the consequences of power outages, maintenance and development of the electrical system. So it is very clear that power losses in transmission lines depends on network parameters, load behavior and climate factors.
Corona power losses generally occur at extra high voltages, in climates that experience low pressure, high temperatures, stormy weather, and rain [9]. This is also the result of a larger conductor size, with a rough and uneven surface which results in a lower critical disruptive voltage. Corona power losses do not occur if the distance between conductors is very large. Therefore, high voltage transmission lines are made with two, three or four conductor bundles where the average geometric radius of the conductor is enlarged.
Furthermore, the loss equation due to the corona in the high voltage transmission line is explained. The corona power losses are expressed by the equation which is the result of research conducted by Peek’s [4]:

where: Pc = transmission line corona power losses (kW / km / phase), δ = relative air density, f = frequency of the electrical system (Hz), r = radius of the transmission line conductor (cm), D = distance between the transmission line conductor (cm), V = phase voltage to neutral transmission line (kV), Vd = critical voltage (kV). In analyzing the influence of tropical climates due to the corona of high voltage air power losses, a relative air density value is needed where the relative air density is affected by the air pressure and the surrounding temperature of the transmission line conductor. The air density equation is shown in equation (2) [10].
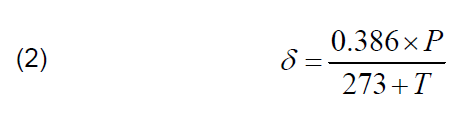
where: δ = relative air density, P = air pressure (mmHg), and T = temperature around the transmission line (°C).
Furthermore, for the disruptive voltage shown in equation (3). Disruptive stress arises due to the emergence of electric field strength due to the collision of electrons in the ionization process. The critical voltage is disruptive considering the influence of conductor factors, conductor and environmental surface uniformity as observed by Peek’s. The critical disruptive voltage value at which the corona begins to form is expressed by:

where: Vd = critical disruptive voltage per transmission line phase (kV), Ec = penetrating air voltage gradient (kV/cm), m = indefinite factor, r = radius of the transmission line conductor (cm), δ = air density relative, and D = distance between transmission line conductors (cm).
The above equations are used in analyzing the influence of tropical climate on the corona power losses at the transmission line in South Sulawesi.
Tropical Climate Effects on Korona Power Losses
Based on the climate data of South Sulawesi, the trend of annual temperature is flat. As with the characteristics of the tropical climate in general, the temperature of each month does not experience large fluctuations. In January, the average temperature was the coldest compared to other months in one year, which was 26.7 °C. While September is the hottest month in a year, with an average temperature of 28.3 °C. From here it can be seen that January is the coldest month, and September is the hottest month.
Corona power loss calculation data based on temperature data for the calculation of average air density per month taken from Table 1 is shown in Fig.2.
Fig.2 shows corona power losses throughout the year based on changes in temperature, where there are graphs based on maximum temperature per month, minimum temperature per month, and average temperature per month. The average corona power losses for the maximum temperature are 2.02 MW, 1.37 MW for the minimum temperature, and 1.63 MW for the average temperature. In the corona power loss chart averaged per month of 275 kV transmission line between Palopo-Makassar, there is no significant increase in corona losses in each month. From Fig.2 also seen in September is the month that has the largest average corona losses of 2.14 MW.
In each corona loss chart throughout the year, the change in the magnitude of the losses is only 0.23 MW for the maximum temperature graph, 0.14 MW for the minimum temperature graph, and 0.12 MW for the average temperature graph.
Seen in Fig.2, the difference in power between maximum temperature and minimum average temperature is 0.65 MW. If the difference in losses occurs all the time, it will cause the operation of the South Sulawesi system to experience fluctuations in the supply of generating power that must be prepared at least equal to the corona losses.
Corona Power Loss Relationships with Humidity
The temperature fluctuations in South Sulawesi are caused by changes in other climatological parameters, namely relative humidity, solar irradiation time, and rainfall. For this reason, it is shown how the relationship between these parameters is to the change in value of corona power losses throughout the year.
The tendency of relative humidity in South Sulawesi in one year is not much different from the air temperature, which is flat, does not experience significant fluctuations. This is mainly seen from the relative relative humidity each month in one year. Table 1 presents the relative relative humidity value, where the highest humidity in January is 89%, while the lowest relative humidity is in September, which is 70.33%.
Judging from Fig.3, it is known that the value of corona power losses has a decreased linear with relative humidity values, where corona power losses tend to increase when the relative humidity decreases. The graph of relative humidity relationship with an increase in the value of corona power losses during the year is shown in Fig.4, where the equation y = -0.0033x + 1.8925 with R2 = 0.2058, where y = corona (MW) power losses, and x = relative humidity (%). So it can described that when the relative humidity around the transmission system decreases, the value of the corona power losses will be greater. In January, with air humidity of 89%, the value of its power losses was only 1.57 MW.
Whereas when the relative humidity drops to 87.67%, the value of the power losses will be greater, which is 1.59 MW.
The Corona Power Loss Relationship with the Duration of Sunshine
Likewise with the sun radiation parameters in a tropical climate. Based on Table 1, the duration of sun exposure in a tropical climate is throughout the day where every day for 12 hours. There are certain months that the duration of the sun’s radiation is slightly disturbed by the presence of clouds, which occurs in January with a figure of 42.0%. While the longest sunshine duration is in August at 83.3%. So it can be ascertained that in August the sky conditions were very bright, only very few clouds covered.
From the graph of the sun irradiation relationship with corona power losses, linear in the same direction is obtained which tends to be the same (Fig.5). The relationship between these two parameters is shown in Fig.6 where the equation based on linear regression is obtained corona losses tend to be directly affected by the duration of sun irradiation in the 275 kV transmission line environment. The equation is y = 0.0018x + 1.513 with R2 = 0.2704, where y = corona power losses (MW), and x = solar irradiation time (%).
When the sun shining for a long time around the transmission line, the corona power losses will also be greater. This is because corona power losses are affected by air temperature which affects relative air density. Therefore, when in January the duration of solar radiation was 42%, the value of its power losses (Pc) was only 1.57 MW. Whereas when the duration of sun exposure is 51.3%, the value of its power losses (Pc) will be even greater, which is 1.59 MW.
Based on the relation of relative humidity and duration of sun irradiation in South Sulawesi, a description of these corona power losses can be made, namely the corona power losses are very dependent on the climatic conditions around the transmission line, where the relative humidity decreases and the duration of sun exposure around the transmission line will accelerate the ionization process so that it causes corona. The decrease in humidity and the duration of sun exposure will affect the air pressure around the transmission line.
Corona Power Loss and Rainfall Relation
Because the relative humidity and the duration of the sun irradiation have shown a relationship pattern with corona power losses approaching linear, then it is reviewed how rainfall affects the magnitude of the corona power losses.
Rain occurs almost all year in tropical climates. Table 1 shows that every month in 2017 there is rain in South Sulawesi. Only 4 months in one year that has little rainfall, ie from August to October. The least rainfall is in August with a value of 440 mm. While in other months it has high rainfall. The highest rainfall is in January with a value of 1322 mm.
If the analysis is based on the relation of rainfall graphs and corona power losses (Fig.7), there is no linear relation pattern, where the pattern of rainfall magnitude fluctuates from large to small which produces a non-linear graph trend. In contrast to corona power losses, the graph tends to be linear. Therefore, changes in rainfall values that occur in the South Sulawesi region for one year are not seen to be directly related to the magnitude of the corona power losses. The largest and smallest value of corona power losses occurs not together with the high and low rainfall values in the South Sulawesi. The relationship between the two parameters is shown in Fig.8, where an equation of the results of linear regression is formed which describes corona power losses not directly affected by the amount of rainfall in the 275 kV transmission line environment. The equation is y = -0.0001x + 66.499 with R2 = 0.0646, where y = corona losses (MW), and x = rainfall(mm).
However, from the results obtained, it can be described that in high and low rainfall conditions that fluctuate throughout the year it affects air humidity, air temperature and air pressure, so that it can affect the high and low air density factors which make the value of corona losses in the transmission line also change in at that time.
Conclusion
From the results of the analysis and discussion it can be concluded that the corona power loss (Pc) is directly affected by the temperature and air pressure around the 275 kV transmission line. When the temperature rises, which generally occurs in sunny weather conditions, corona power losses will increase, and vice versa. As a result of temperature changes in South Sulawesi, including tropical climates from the maximum temperature to the minimum temperature, a difference in corona power losses of 0.65 MW can occur throughout the year.
The influence of other tropical climate parameters that are quite dominant affecting corona power losses is the duration of sun exposure. The relationship of the duration of sun irradiation with the value of corona power losses is linearly ascending. Similarly relative humidity also influences the magnitude of corona power losses, which are linearly decreasing. The relative humidity and the rainfall which are also tropical climate parameters connected with the magnitude of the corona power losses in South Sulawesi.
Acknowledgment: The authors gratefully acknowledge Indonesia Government of ministry of research and higher education for financial support of this research.
REFERENCES
[1] Bao-hui, Z., Li-yong, W., Wen-hao, Z., De-cai, Z., Feng, Y., Jinfeng, R., Han, X., Gang-liang, Y., 2005. Implementation of power system security and reliability considering risk under environment of electricity market. IEEE/PES Transmission and Distribution Conference & Exhibition: Asia and Pacific Dalian, China.
[2] ESDM Ministry (Indonesia), 2016. PLN electric power supply business plan for 2016 – 2025. Jakarta.
[3] Yahaya, E.A., Jacob, T., Nwohu, M., Abubakar, A., 2013. Power loss due to corona on high voltage transmission lines. IOSR Journal of Electrical and Electronics Engineering (IOSRJEEE), Vol. 8 No. 3, pp 14-19.
[4] Momani, M.A., 2015. Factors affecting corona power losses in Jordan power grid, 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), IEEE.
[5] Kral, V., Rusek, S., Rudolf, L., 2011. Software for calculation of technical losses in transmission network. Przeglad Elektrotechniczny, R. 87 NR 2, pp 91-93.
[6] Loxton, A.E., Britten, A.C., 2002. The measurement and assessment of corona power losses on 400 kV transmission lines. IEEE Africon.
[7] BPS-Statistics of South Sulawesi, 2018. South Sulawesi province in figures. Makassar, Indonesia.
[8] Masoum, A.S., Moses, P.S., 2011. Distribution transformer losses and performance in smart grids with residential plug-in electric vehicles. ISGT, IEEE.
[9] Liu, Y., You, S., Wan, Q., Lu, F., Chen, W., Chen, Y., 2009. UHV AC corona loss measurement and analysis under rain. Proceedings of the 9th International Conference on Properties and Applications of Dielectric Materials, July 19-23, Harbin, China.
[10] Tonmitr, K., Ratanabuntha, T., Tonmitr, N., Kaneko, E., 2016. Reduction of power loss from corona phenomena in high voltage transmission line 115 and 230 kV. Procedia Computer Science, 86, pp 381 – 384.
Authors: Ikhlas Kitta, Salama Manjang, Ida Rachmaniar, Faris Maricar; Electrical Engineering Department, Hasanuddin University; Makassar, South Sulawesi, Indonesia. Address: Jl. Perintis Kemerdekaan Km.10, 90245. Makassar. E-mail: ikhlaskitta@gmail.com, salamamanjang@gmail.com
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 95 NR 1/2019. doi:10.15199/48.2019.01.48