Published by Anna ZIELIŃSKA, AGH University of Science and Technology
Abstract: The article presents the infrastructure for charging electric vehicles, their development and the types and methods of charging. The paper presents the results of testing the level of vehicle charge depending on the route traveled and its dynamics. The test results show the change in the level of discharging the battery from the route length.
Streszczenie: Artykuł przedstawia infrastrukturę ładowania pojazdów elektrycznych, ich rozwój oraz rodzaje i sposoby ładowania. W pracy przedstawiono wyniki badań poziomu naładowania pojazdu w zależności od przebytej trasy i jej dynamiki. Wynik badań pokazują zmianę poziom rozładowywania baterii od długości trasy. (Infrastruktura ładowania i badanie spadku poziomu energii akumulatora samochodu elektrycznego).
Keywords: electric vehicle, charging, charging infrastructure.
Słowa kluczowe: samochód elektryczny, ładowanie, infrastruktura ładowania.
Introduction
The motoring and electricity markets have been separate sectors of the economy not so long ago. They operated independently of each other, they did not have a common recipient –– a common denominator. It resulted from the fact that they presented types of energy carriers – although in both cases they were fossil. Currently, the dynamically developing automotive and transport sector opens up a whole new dimension of usability. The transport sector is responsible for about 30% of the total final energy consumption and for about 25% of harmful gas emissions [1]. One of the ways to reduce this share is to replace traditional vehicles with internal combustion engines (ICE) with battery electric vehicles (EV) and hybrid vehicles with an extended range with a battery (plug–in hybrid electric vehicle PHEV) [2].
Electric vehicles are much more energy–efficient and clean, i.e. they do not emit these impurities. Among other things, for this reason, as current sources state until 2030, half of the cars in the world will be electrified. 20% of cars sold in Europe until 2023. will have an electric motor. The total withdrawal of combustion cars from sale until 2030 is declared by countries such as Norway, the Netherlands and Germany [3].
To achieve these results and maintain the current upward trend, electric vehicles must be widely used in the future (Fig.2.). Although they still have a small market share, there is an increasing interest in this type of technology. This is achieved by overcoming their traditional bottleneck, which provides short range, high price (these two are mainly related to the battery) and lack of charging infrastructure, also of quick type [4].
To illustrate the main “deceleration of expansion” of the electric vehicle in the simple comparative analysis of EV and a diesel–powered car, the cost of purchase, annual operating costs, replacement cost of batteries (after 8 years for EV), fuel cost, electricity costs, and the assumed monthly distance covered on the level of 1500 km [5].
As can be seen from the graph (Fig. 1.), electric vehicle is more expensive to use today than traditional drive. However, the important fact is that EV has a much lower increase in costs over time –– it is more stable, of course, after an agreed period, there is a drastic increase in costs caused by the replacement of batteries, but nevertheless, in the longer term, its use looks appealing.


The second factor limiting the interest in the electric vehicles is the lack of charging infrastructure. Currently, for the vast majority of EV holders, the charging process takes place at home, by connecting to a household power grid. The average charging time is so long that charging takes place at night and the small range of the battery limits long journeys.
Guided by the above–mentioned factors, the work presents charging methods for electric vehicles, infrastructure, future charging possibilities and the current application of the solution. The battery capacity and discharging tests are shown. One of the most popular cars in the EV sector – the Fiat 500e – was used for the analysis. Investigating the driving dynamics and its length shows the dependence of battery discharge and charging times
The infrastructure of charging electric vehicles
The appearance of electric vehicles permanently in the public space will mean a drastic change in consumer behaviour by offering them a new quality of movement – quiet, dynamic and ecological. However, to make this happen, the previously mentioned development of charging infrastructure for EV is necessary [7].
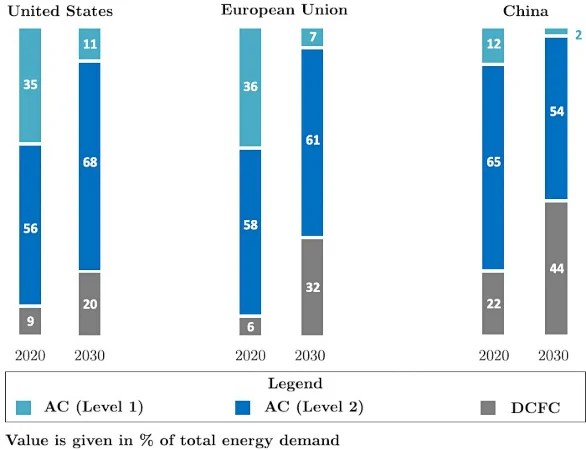
There is currently a division into three groups of charging stations for EV. The power level at the charging point has a significant effect on the battery charging time of the EV. We currently distinguish:
• I –the charger fits inside the car. From the distributor, alternating current is sent from a standard 230V single–phase socket. The converter power to be obtained is limited to 2 KW, which results in charging the battery depending on the capacity from 11 to 14 hours.
• II – The charger fits inside the car. The vehicle is loaded with alternating current, one or three–phase. The power can reach up to 20 KW, which means that the charging time is reduced to 2 – 3 hours,
• III – In this case, the charger is outside EV. The vehicle’s battery terminals are connected to a special connector located on the vehicle. It requires a DC power supply. The system’s power reaches up to 50 KW. This method allows you to charge up to 80% of the battery capacity in just 15 – 30 minutes, and the battery is fully charged in 1 hour [8].

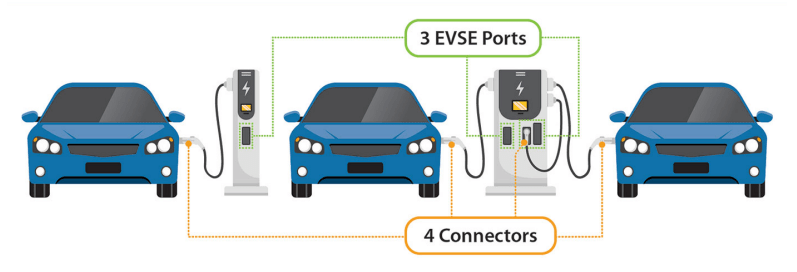
With the development of the market there will be various types of chargers for electric cars. One of them will be ultra–fast charging stations for DC electric cars with 100 kW and 300 kW. Their purpose will vary depending on where they are placed (Fig.3.). On highways, expressways, usually at hotels, restaurants or service areas, stations with high powers will be installed, for direct current, where the most important factor will be time, not the price of the service. In this case, customers will be willing to stop for 30–45 minutes to replace the battery for another 200––300 km [7]. It should be emphasized that even if the stations belong to many charging operators – CPO (Charging Point Operators), they will be associated with consistent settlement systems, enabling each client to use them, e.g. by means of a mobile application or RFID card, to enable moving over long distances in the country and in Europe. The situation was different in cities where cars travel a lot smaller distances, more often they park and can be loaded during overnight stays. The city infrastructure is developed primarily at freestanding stations (available in public or private areas, e.g. in garages of underground housing estates), equipped with slow or medium–speed chargers – between 11 and 22 kW AC.
A completely different concept, in contrast to the charging of contact electric vehicles, is charging wirelessly. For many, free of defects and providing unlimited range when electrified roads. In this type of charging, the most promising solution is the use of energy transfer on the principle of magnetic induction. A system composed of two coils, one in the vehicle of the other at the stopping place, magnetically coupled and forming a transformer with a large air space. The coil located in the transmitter generates a variable electromagnetic field, while in the coil placed in the vehicle, under the influence of this field, a variable electromotive force SEM is created. The energy after conversion in the charger charges the batteries [8]. Such a system is very simple to use and at the same time resistant to external factors [2]. Most often wireless power systems are used to power machines on production belts, however, for electric vehicles, such a system was also developed at the end of the nineties by General Motors.
There is also another way of wireless charging, based on the principle of electromagnetic resonance. The resonance system is mounted in the vehicle. EV charging occurs after the electromagnetic resonance of the transmitter and receiver is synchronized. This method is so much better than during charging there is no need for precise positioning of the system components. A big plus is a more efficient energy transfer. It is possible to transmit power of 3.3 kW at a distance of 20 cm, with losses of only 10%. These systems are lighter and much smaller than induction systems. The magnetic resonance charging method is cheaper, easier to build and safer compared to other wireless methods [8].
The classification and evaluation of wireless charging systems have:
• the power of the system that determines the duration of the loading process
• the acceptable distance between the surface of the ground and the location of the system in the vehicle,
• energy conversion efficiency, determined between the power supply network and the battery terminals
• tolerance in positioning the vehicle on the parking spot,
• vehicle dimensions and weight.
Another way to charge an EV that is considered but used only in a pilot manner is charging by changing the battery. The process involves replacing a discharged battery with a charged one, and charging takes place outside the vehicle. Battery replacement is to take place in a specially constructed station, which will be fully automated, and the entire process will be supervised and performed by robots [8]. In the future, the entire battery replacement process will take no more than one minute. However, as of today, the price of such a service has not been provided.
A separate aspect connecting directly with the infrastructure for charging electric vehicles will be the settlement of the charging process. The charging price will probably vary depending on the charging time, location and type of charger. This is also a big challenge for legal regulations on this topic.
In the future, science will probably create other ways of loading. Although today we would like the “fuel” that is electric energy to be available in such a way as to ensure driving safety in the context of the distance covered. This change in the way of refuelling will be both a challenge for customers and an opportunity for owners of residential and commercial properties to meet this emerging need. Ultimately, charging stations for EV will become common, democratization will take place in access to them, especially if the business or individual clients invest in their own renewable energy sources [7]
Battery discharge measurements
In addition to charging infrastructure, another issue in the context of the use of electric vehicles is their operation, i.e. energy consumption [9]. In the European Union in the approval tests, the energy consumption of electric vehicles is determined in accordance with the procedure described in UNECE Regulation No. 101. The vehicle is tested on a chassis dynamometer in the NEDC test, this test simulates urban and extra–urban driving [10]. In order to increase the level of information on the properties of electric vehicles, other tests are also performed in running tests, corresponding to different traffic conditions, as well as in traction conditions, during the actual use of the vehicle [11] [12].
To describe the energy and economic properties of electric vehicles, the concepts characterizing energy efficiency and consumption are used.
For electric vehicles without braking energy recovery, the efficiency system is defined as follows:
• drive efficiency

• battery charging efficiency
• general efficiency

where: NT – the power of the electric drive of the car, NR – power resistance, NCH –battery charging power.
For an electric vehicle with braking energy recovery, the efficiency system is defined as follows:
• drive efficiency
• efficiency of braking energy recovery
where: NB – braking power of the electric machine, NU – braking energy recovery power.
Road energy consumption is described as a derivative of the energy consumed relative to the distance travelled by the vehicle. For an EV without braking energy recovery, the road energy consumption is:

where: s – expensive vehicle, L(T)(s) – work of electric vehicle drive as a function of the road.
For an electric vehicle with braking energy recovery, the road energy consumption is:

where: LU(s) – regenerative braking energy as a function of the road [12].
The paper presents the results of an examination of an EV Fiat 500e model in urban conditions. The aim of the study was to assess the road use of energy, the battery power of its linear or non–linear decrease in terms of the number of kilometres travelled and the analysis of battery consumption in different driving dynamics and in the use of other systems existing in the car (such as air conditioning). Below is the technical data table of the car.
Table 1. Data for an electric car Fiat model 500e

The Fiat 500e is equipped with a traction drive with a maximum power of 83 kW, making it one of the more dynamic electric vehicles available on the market. Disputes for such a small car is also placed under the seats of a pack of batteries, accumulating 24 kWh of energy. To charge the batteries, Fiat decided to use only a 6,6 kW onboard charger. The car was produced in 2015 in Mexico and imported to Poland from California. At the beginning of the tests, the meter’s mileage was 56335 km. The car roamed the routes in the city in the summer season at ambient temperatures from 22 to 27 oC.
During the tests, the battery level before and after the route and the length of the route itself was checked. The analysis of the data collected during the tests shows that the considerable mileage of the car and hundreds of charging cycles did not negatively affect the battery condition in the car. The battery still retains its initial capacity. The tests were conducted in conditions of normal car use, in standard quiet and dynamic conditions of driving, in traffic jams, with the use of air conditioning and without. The main goal of the research was to see if the battery maintains a linear power drop or in higher battery power ranges the range of the car is greater. For the tests, a car with a considerable mileage was intentionally selected to eliminate the “new battery” syndrome. After analyzing the data, there was no significant deviation in relation to the linear decrease in the range of the car along with the decreasing level of battery charge. The graph below (Fig.4.) presents all 17 measurements showing the number of kilometres driven in relation to the decrease in battery power expressed in percentage points.

For most of the measurements made, the ratio of the battery power drop and kilometres travelled ranged from 0,8 to 1,2. For several measurements, the results did not differ much from this level, the points marked with a square in the graph show a higher value of the power drop per one kilometre travelled. Such measurements belong to exceptionally dynamic routes and for the air conditioning system in operation. With such parameters of driving, faster battery discharge is observed. The point on the graph marked with a triangle shows a short ride in the traffic jam with the air conditioning set to the lowest temperature – for this route, there were about 2,6 points of the power drop per one kilometre travelled.
After the analysis, it was noticed that the length of the route is less important than its dynamics and driving style. For constant speed the power loss will be in a linear and predictable way while driving with a higher load on one battery charge, we will travel a longer route. Nevertheless, the energy saved is not significant enough to be a determinant and determines the driver’s behaviour.
Summary
Most electric vehicle is sold in Norway, France, Germany and the United Kingdom (these four countries account for 72.4% of all new registrations of EV in Europe [5]), almost in all Europe, the number of registered electric cars is growing every year. As the markets show, the development and popularity of electric vehicles is surprisingly growing year by year, but nevertheless most importantly can be recognized as the fact that:
• the current development priority for electric vehicles is the development of charging infrastructure,
• the decision on the purchase of an EV in addition to the price is decided by the range and the possibility of charging, in most cases only the newly created charging points of electric vehicles are able to influence the decision of the buyers regarding the type of drive,
• ensuring the possibility of loading, we eliminate the fears of limited distance that can be overcome,
• choosing a car with electric drive on a large scale will affect the ecology and the environment – the elimination of harmful gases and dust will absolutely improve the comfort especially in large urban agglomerations where the traffic volume is the greatest.
• Studies of energy consumption by electric vehicles are usually carried out under homologation conditions. In the case of tests carried out, it was tried to reproduce the conditions of normal car use as faithfully as possible, i.e. in the presented work it was shown that:
• to reproduce the everyday conditions of car use, the car was introduced into a traffic jam, subjected to smooth and smooth driving and dynamic driving with the use of on–board systems,
• research results showed a fairly low sensitivity of energy consumption to the vehicle traffic model,
• noticeable increased energy consumption from the battery was noticed while driving in a traffic jam, with the air conditioning system turned on and for dynamic and fast
• nevertheless, in all cases the average energy consumption per one kilometre of the route is satisfactory and gives the opportunity and perspective for the spread and popularization of electric vehicles on the roads.
LITERATURA
[1]. U.S. Energy Information Agency. International Energy Outlook 2014; (2014)
[2]. Guziński J., Adamowicz M., Kamiński J., Infrastruktura ładowania pojazdów elektrycznych, Automatyka-Elektryka-Zakłócenia, 1/2014, (2014)
[3]. Zielińska A., Skowron M., Bień A., Infrastruktura fotowoltaiczna do ładowania pojazdów elektrycznych — Photovoltaic infrastructure for charging electric vehicles, XXVIII sympozjum środowiskowe PTZE, ISBN10: 83-88131-99-0., (2018), 370–372
[4]. Nunesn P., Figueiredo R., Brito M. C., The use of parking lots to solar-charge electric vehicles, Renewable and Sustainable Energy Reviews, 66/2016, (2016), 679–693
[5]. http://samochodyelektryczne.org/wyniki_sprzedazy_aut_elektrycznych_w_europie_w_2017r_kraje_i_modele.html for 23.07.2018
[6]. Korolec M., Boleska K., Napędzamy Polską Przyszłość, 19.02.2018.
[7]. https://www.muratorplus.pl/technika/instalacjeelektryczne/stacje-ladowania-samochodow-elektrycznychrodzaje-stacji-ladowania-sposoby-rozliczen-aa-AsuM-ME8B-93W8.html for 01.10.2018
[8]. Zajkowski K., Seroka K., Przegląd możliwych sposobów ładowania akumulatorów w pojazdach z napędem elektrycznym, Autobusy, 7-8/2017, (2017)
[9]. Chłopek Z., Lasocki L., Badania zużycia energii przez samochód elektryczny w warunkach ruchu w mieście, Zeszyty Naukowe Instytutu Pojazdów 1(97)/2014, (2014)
[10]. Raslavičius L., Starevičius M., Keršys A., K. Pilkauskas K., Vilkauskas A., Performance of an all–electric vehicle under UN ECE R101 test conditions: A feasibility study for the city of Kaunas, Lithuania. Energy, 55(15), (2013), 436–448
[11]. Lorf C., Martínez–Botas R.F., Howey D. A., Lytton L., Cussons B., Comparative analysis of the energy
consumption and CO2 emissions of 40 electric, plug–in hybrid electric, hybrid electric and internal combustion engine vehicles. Transportation Research Part D, z. 23, (2013), 12–19
[12]. Wantuch A., Kurgan E., Gas P.: Numerical Analysis on Cathodic Protection of Underground Structures, in 2016 13th Selected Issues of Electrical Engineering and Electronics (WZEE), IEEE Xplore, (2016)
[13]. Chłopek Z., Badanie zużycia energii przez samochód elektryczny,https://depot.ceon.pl/bitstream/handle/123456789/562/POL_2012_3_Badanie_zuzycia_energii_przez_samochod_elektryczny.pdf?sequence=1&isAllowed=y for 01.10.2018
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 95 NR 1/2019. doi:10.15199/48.2019.01.38