Published by Milan ŠIMKO1, Daniel KORENČIAK1, Miroslav GUTTEN1, Richard JANURA1,
University of Zilina, Slovakia (1)
Abstract. The first part of paper deals with the base information about diagnostics and analysis of transformer insulating system in time domain. The second part of paper deals with proposal measuring system of moisture analysis by return voltage method (RVM) for power oil transformers. RVM method is wide state specifying method which is not set in standards but in many cases is a method which is determining a clear and exact result. The results have mainly shows moisture content, content of conductive impurities in oil and degree of aging of paper insulation impact.
Streszczenie. Przedstawiono metody diagnostyki stanu izolacji transformatorów w czasie rzeczywistym. Zaproponowano nowy system diagnostyki bazujący na analizie wilgotności na podstawie napięcia powrotnego. Badania potwierdziły przydatność metody. (System diagnostyczny do analizy stanu izolacji transformatora bazujący na pomiarze napięcia powrotnego)
Keywords: Transformer, diagnostics, measuring system, insulation
Słowa kluczowe: diagnostyka, izolacja w transformatorze, napięcie powrotne
1. Introduction
Influence of operating conditions leads to aging of individual parts of transformer, and also to changes of the major electrical and mechanical properties. To the check of the condition greatly contributes electro-technical diagnosis, whose main task is to find a clear relation between the change in functional characteristics of the machine and some measurable values. The assessment of these measured values must be visible not only the rate of change, but also whether it is a permanent or reversible state. The aim of diagnostics of transformers is to verify that the machine complies with the determined conditions in accordance with standards [1].
Economically reliable and effective power delivery always is the primary concern to utilities all over the world. Insulation diagnostics is one of the requirements for safe operation of transformers. Conventional methods to assessment of insulation condition are its loss factor, insulation resistance and partial discharge measurement, etc. These methods, however, provide only partial picture about the polarization processes in insulating material.
Deregulation of power market has increased the competition and also emphasized on the search for the new, efficient and effective methods for diagnosing the insulating system. The use of the return voltage method is significant way to detect ageing of the insulation of operating power transformer in a non-destructive manner [2].
To prevent a damage state of transformers, we perform different types of the measurements that should illustrate an actual condition of the measured equipment. It is therefore important to choose a suitable diagnostics for the right prediction of such conditions. [3, 4]
2. The Diagnostic Insulating Methods in Time Domain
The most often methods use measurements of winding resistance and impedance, voltage ratio, insulation resistance, winding capacities are also measured in some cases. If it is possible in terms of machine dimension partial discharges are measured or by means of acoustic sensors implemented directly on the machine. The thermal camera can capture the distribution of the temperature fields of machines in their surface under load, etc.
In last few years several diagnostic techniques have been developed and used to determine the power transformer insulation. That means this techniques must determine insulator composed from transformer oil and paper in main. Named techniques are DGA (Dissolved Gas Analysis), DP (degree of polymerization) and Furan analysis by HPLC (High Performance Liquid Chromatography). In nowadays is possible to capture very low current involved in dielectric relaxation process. This is door open to technique like RVM (Return Voltage Measurement) or PDC (Polarization Depolarization Current). Those techniques have been introduced in 90’s. This measurements technique has gained popularity for its ability to assess the condition of oil and paper separately without opening the transformer tank [5].
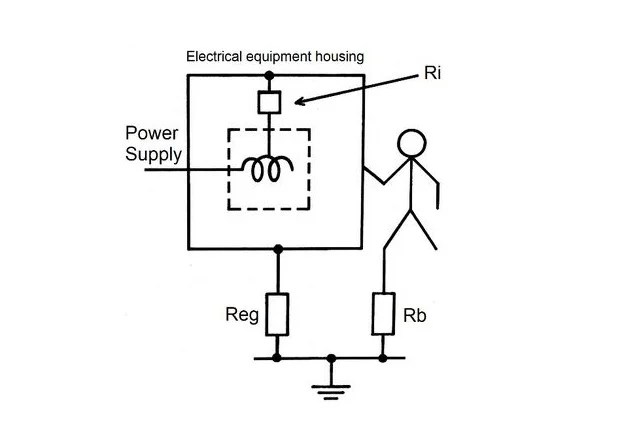
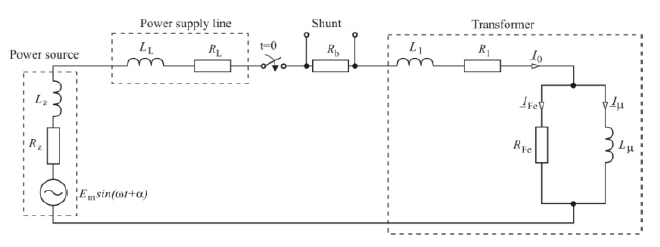
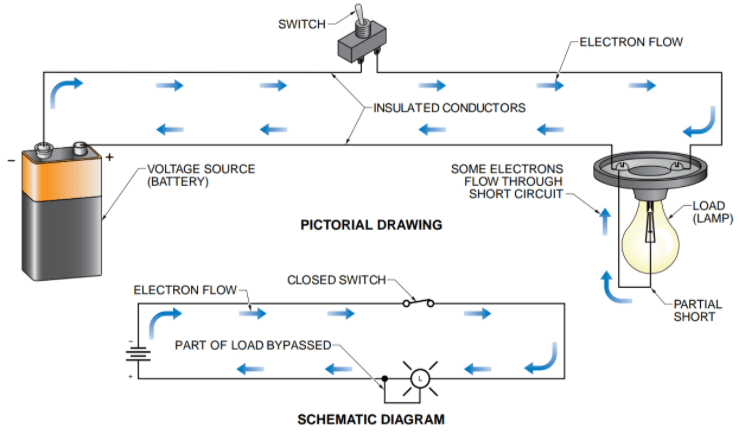
For PDC analysis is DC voltage step (amplitude U0) of some 100 V is applied between HW (high voltage) and LV (low voltage) windings during a certain time, the so-called polarization duration. Thus a charging current of the transformer capacitance, i.e. insulation system, the so called polarization current, flows. It is a pulse-like current during the instant of voltage application which decreases during the polarization duration to a certain value given by the conductivity of the insulation system. After elapsing the polarization duration, the switch goes into the other position and the dielectric is short circuited via the ammeter. Thus, a discharging current jumps to a negative value, which goes gradually towards zero. The simple measurement system of RVM method is shown in Fig.1 [6].
The RVM method consists of plotting the measured maximum response times with respect to the charging time, from which it is possible to determine the moisture content of the insulation in high-voltage oil equipment. In general, this method is intended for non-destructive, off-line determination of the state of the isolation system of transformers, cables or other devices that are comprised of the conductor and the insulator [7].
If the method is applied to an oil transformer, it determines the moisture content at the oil-paper dividing line. Measured values determine the time constant and the slope of the voltage response rise.
Based on the relationships listed in [8], paper moisture and conductivity in oil can be calculated with sufficient precision.
3. Introduced Measuring System for Determining Insulating State
The RVM method itself – measuring the voltage response of an insulating system, does not belong to Slovakia among the used methods. The proposal is based on the need to measure this method and because of the high cost of a narrowly specified commercial device. According to available information, this method is used in Slovakia only for measuring the insulation of the cables. Although this method was originally designed for cable diagnostics, its simplicity and precision in determining humidity is also applicable to high voltage electric machines.
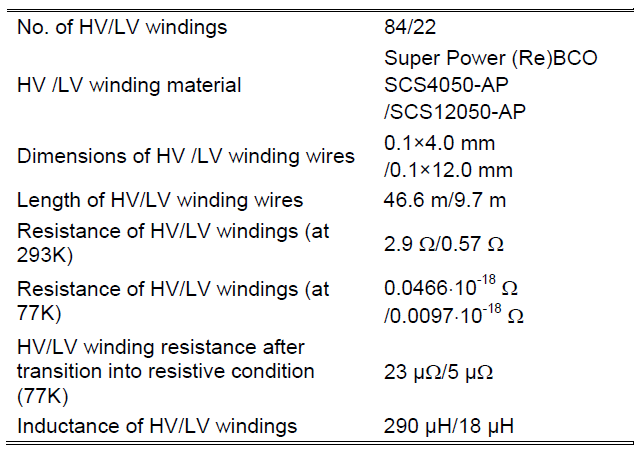
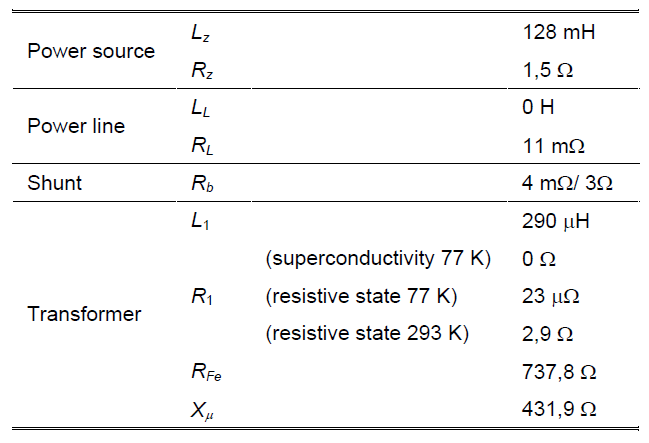
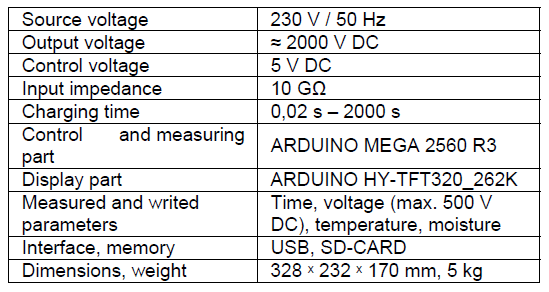
The proposed system can therefore be used to analyze the paper moisture state of power transformers. Parameters of the proposed measurement system for diagnostics of transformers are presented in Table 1.
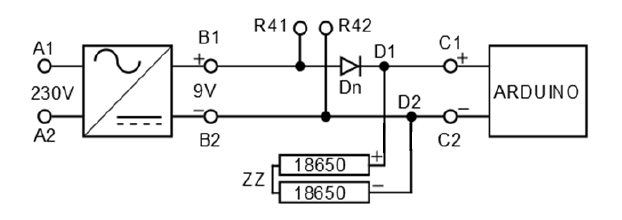
The source section of the device consists of two separate transducers. The main source for powering the ARDUINO platform is the rectifier from 230 VAC to 9 VDC / 2A. Despite the maximum supply voltage of 12 VDC, the output voltage of the stabilized voltage of 9 V is sufficient. The control voltage of the switching modules is from a separate inverter for protection. This voltage is at 5 VDC.
Fig. 2 shows a block diagram for the ARDUINO platform. This design also uses a back-up and at the same time a smoother source consisting of two series of connected 3.7 V batteries of type SJ 18650, each of which has its own protective charging circuit type TD1836.
TABLE I. PARAMETERS OF MEASURING SYSTEM BY RVM METHOD
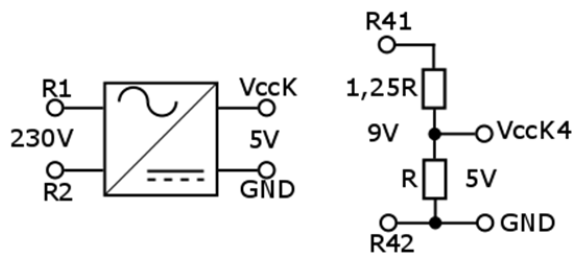
The control voltage of the switching modules is powered by a separate rectifier to protect the control panel. This voltage is at 5 VDC. In the Fig. 3 are a block diagram and a signaling of switch point source points and a voltage divider that supplies a switching module K4.
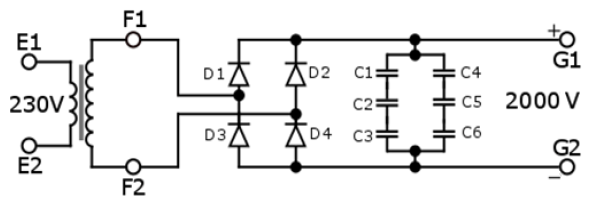
In order to protect the platform’s sensitive circuits and switch module control, both inverters are secured by a fuse. The high-voltage part of the measuring instrument is made of a single-phase transformer with an output voltage of 2100 V. This voltage is then guided by a bridge rectifier composed of four PRHVP2A-20 high-voltage diodes and a series-parallel connection of capacitors of the MKPI 337 type with a resulting capacity of 667 nF for reliable smoothing of the given run.
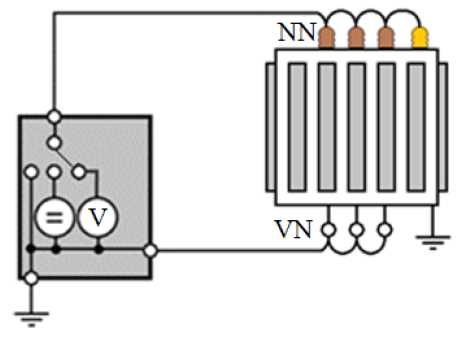
Since the proposed measuring instrument used to measure the voltage response of the transformer isolation system, that is to say, is connected between the coupled HV (high-voltage) and LV (low-voltage) windings, the load resistance is at the GΩ level. This high value is almost empty. Therefore, the output voltage when measuring 50 MΩ load with high voltage resistor can reach 2000 VDC. The diagram of the connection of the high voltage part is in Fig.4.
Output voltage control, measurement and short-circuit connection are realized by ARDUINO switching modules controlled by 5 V voltage. Fig. 5 shows the connection and marking of the terminals.
The switching module K1 consists of a series connection of SRD-05VDC-SL-C switching relays on a four channel switching module to achieve the required electrical strength. The left section of Fig.5 represents the normal no voltage state of the connection, therefore the terminals T1 and T2 are connected via the discharging resistance Rv.
To achieve a higher degree of safety, the switching modules K1, K2 and K3 are switched by the K4 module. This and switching module K3 ensures that, when switched on, in which no measurement is made, there is no dangerous voltage between terminals G1 and G2.
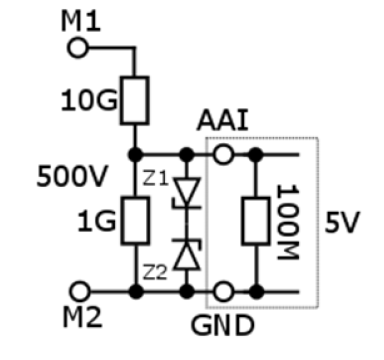
The measuring part of the instrument consists of the voltage divider shown in Fig. A serial connection of ten 1 GΩ precision measuring resistors is used to provide input 10 GΩ. This divider is a voltage at the platform input with a 100 MΩ input at a maximum of 4.95 V. If the input voltage between the M1 and M2 terminals exceeds 500 V (5 V between AAI and GND), the two Zener diodes Z1 and Z2 provide a secure upper the voltage limit.
4. Experimental Measurement and Diagnostics
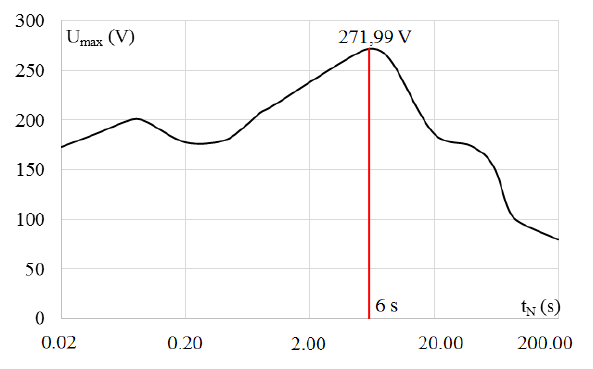
The evaluation of the measurement and therefore the determination of the moisture content in the paper part of the isolation system of the oil transformer 22/0.4 kV can be determined from the analysis of the charging time and the maximum Umax voltage response according to Fig. 7 till Fig. 9.
For this evaluation, it is sufficient to write real time and measured voltage to the SD card. From this stored text document, time and voltage values are evaluated on a separate PC in one of the available computational programs. These text documents are named as rvmx, where x is the serial number of the measurement. For better orientation, the creation time is also indicated.
Measurement of the voltage response depends largely on the temperature difference between the object and the surroundings. Since the measured transformer is unconnected to the grid and is located in the laboratory, the temperature difference is zero [9]. This is confirmed by measuring the winding temperature on the transformer by incorporating the Neoptix temperature probes and measuring the outside temperature with a 22 ° C by thermometer.
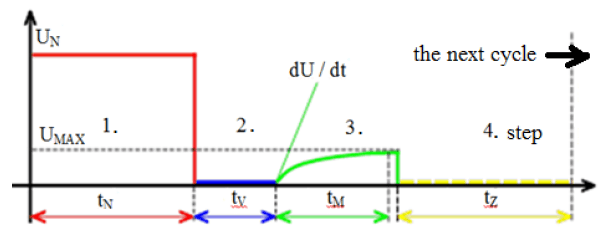
Measurement of return voltage by RVM consists of the four steps of Fig. 7 [10]. In the first step, the LV and HV transformer terminals are connected to the test voltage for the charging time tN. This step is called charging. In the second step, there is a discharge for tV = tN / 2, where the LV and HV terminals are short-circuited. In the third step, the measurement of the voltage response and the time itself is carried out until the maximum voltage is reached. The last fourth step of measuring the voltage response consists of a recovery before another cycle for a time at least equal to tN.
The time behaviour and the individual measurement steps are shown in the Fig. 7 and the graphical representation with the maximum value of the measured voltage response values, depending on the charging time, is shown in the Fig. 8.
The measurement of the voltage response of the insulation system consists of determining the moisture content of the paper part. This determination is derived from the characteristics of Fig. 9, which are obtained by actual measurements on samples of different humidity at different temperatures. These evaluation curves in another version are also reported in the literature [11].
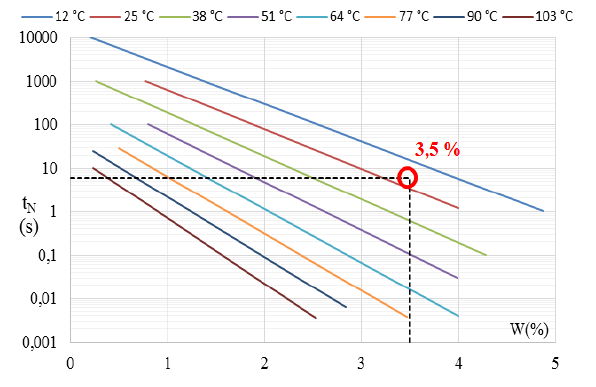
In Fig. 9 is shown the intercept point for moisture content of 3.5% corresponding to the highest possible moisture value in the paper section of the transformer insulation. Since the moisture content was also controlled by the dielectric spectroscopy with method of frequency response and the result of the evaluation was the same, it is obvious that no significant amount of sludge is deposited on the paper. The suspension itself in the transformer oil does not have a more serious effect on the result of this measurement.
Conclusion
This experimental analysis with designed system can be used as new system platform for determination of moisture in power oil transformer.
The proposed system, in comparison with other commercial devices, can evaluate the moisture status of paper part in the transformer insulation.
The measuring method RVM are unique in terms of analysis of insulating system of oil power transformers. In comparison with other methods, the RVM method can evaluate the moisture condition of the insulation paper of the power transformer with high accurate. This high reliability in determining moisture in paper was shown by determining the same result (3.5%) on the same measured distribution transformer as in case other method by frequency dielectric spectroscopy.
Precise determination of moisture content is very complex, because in the measured object in which the maximum voltage response is reached at shorter charging times, the moisture content of the insulation is higher. The maximum voltage response of the new transformers at lower moisture is achieved with longer charging times, what is the problem. From high accurate measurement it has been found a necessary to attach a sufficiently large high voltage (minimal from 2 kV).
Workers from individual test centres formulated their proposals and suggestions during the preparation phase as well as realization phase of the system development. After the system was brought into life, measurements of transformers became easier, safer and more accurate – in accordance with requirements from valid IEC standards.
This work was partially supported by the Grant Agency VEGA from the Ministry of Education of Slovak Republic under contract 1/0471/20.
REFERENCES
[1] Mentlík V. and et al., Diagnostics of electrical equipment, Prague: BEN, 2008, 439 pp., ISBN 978-80-7300-232-9.
[2] Monatanari G. C., Polarization and space charge behavior of unaged and electrically aged crosslinked polyethylene, In: IEEE Trans. Dielectr. Electr. Insul., vol. 7, pp. 474-479, 2000.
[3] Heatcote, M. J.,The J & P Transformer Book 13th edition, Chennai: ELSEVIER, 2007. p. 989. ISBN 978-0-7506-8164-3.
[4] Shayegani A. A., Hassan O., Borsi H., Gockenbach E., Mosheni H., PDC Measurement Evaluation On Oil-Pressboard Samples, In: International Conference on Solid Dielectrics, zv. 4, pp. 50-62, 2004.
[5] Petras J., Kurimsky J., Balogh J., Cimbala R., Dzmura J., Dolnik B., Kolcunova I., Thermally stimulated acoustic energy shift in transformer oil, Acta Acustica United with Acustica, 102(2016), No. 1, 16-22
[6] Leibfried T., Kachler A. J., Insulation Diagnostics on Power Transformers using the Polarisation and Depolarisation Current (PDC) Analysis, In: International Symposium on Electrical Insulation, zv. 10, pp. 170-173, 2002.
[7] Cimbala R., Kurimský J., Kolcunová I., Determination of Thermal Ageing Influence on Rotating Machine Insulation System Using Dielectric Spectroscopy, In: Przegląd Elektrotechniczny. Vol. 87, no. 8 (2011), p. 176-179. ISSN
0033-2097
[8] Kucera M., Sebok M., Electromagnetic compatibility analysis of electrical equipment’, In: DEMISEE 2016,” International conference Diagnostic of electrical machines and insulating systems in electrical engineering, Papradno, SR, 2016, p. 104-109.
[9] Brandt M., Identification failure of 3 MVA furnace transformer, DEMISEE 2016, International conference Diagnostic of electrical machines and insulating systems in electrical engineering, Papradno, SR, 2016
[10] Kúdelčík J., Hardoň Š., Varačka L., Measurement of Complex Permittivity of Oil-Based Ferrofluid in Magnetic Field, In: Acta Physica Polonica A, vol.131(4), pp. 931-933 (2017)
[11] Neimanis R., On Estimation of Moisture Content in Mass Impregnated Distribution Cables, Stockholm: Royal Institute of Technology Stockholm, 2001, ISSN 1100-1593
[12] Brandt M., Experimental measurement and analysis of frequency responses SFRA for rotating electrical machines, Elektroenergetika 2017, Stará Lesná, SR 284-288.
[13] Bartłomiejczyk M., Hamacek S., Kolosov D., Zharkov Y., Automated Diagnostics of Current Pick-Up Disturbances in Electric Traction Network’s, In: 14TH Intrnational Conference on Environment and Electrical Engineering (EEEIC), 2014.
Authors: Assoc. Prof. Milan Šimko, PhD.; Assoc. Prof. Daniel Korenčiak, PhD.; Prof. Miroslav Gutten, PhD.; Ing. Richard Janura, PhD.; Faculty of Electrical Engineering and Information Technology of the University of Žilina Department of Measurement and Applied Electrical Engineering, Univerzitná 1, 010 26 Žilina, Slovak Republic, E-mail:gutten@fel.uniza.sk.
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 96 NR 12/2020. doi:10.15199/48.2020.12.12