Published by Iva PAVLOVA-MARCINIAK, Czestochowa University of Technology, Institute of Power Engineering
Abstract. The paper presents the analysis of modern nuclear energy development possibilities in Poland, which is considered as an ecological energy source. As the demand for electrical energy is constantly growing the use of such energy sources in one of the ways to meet the requirements of the Paris Agreement, adopted at COP (Conference of Parties) 21, 2015. The agreement obliges the countries around the world to develop a low carbon dioxide emission economy in order to stop the global temperature rise at 2°C and preferably at 1.5°C.
Streszczenie. Artykuł przedstawia wyniki analizy możliwości rozwoju współczesnej energetyki jądrowej w Polsce, zaliczanej do ekologicznych źródeł energii. Wykorzystanie takich źródeł do produkcji energii elektrycznej, której zapotrzebowanie stale rośnie, jest jednym ze sposobów na spełnienie postanowień porozumienia paryskiego, przyjętego na COP 21 w 2015 r. Umowa zobowiązuje państwa na całym świecie do opracowania niskiego poziomu emisji dwutlenku węgla, aby wzrost temperatury na ziemi nie przekraczał 2°C, a najlepiej 1.5°C. (Zastosowanie elektrowni jądrowych w Polsce – sposób na spełnienie założeń Paryskiego Porozumienia).
Keywords: clean energy, nuclear reactor, biological protection, COP (Conference of Parties).
Słowa kluczowe: czysta energia, reaktor jądrowy, ochrona biologiczna, COP.
Introduction
The atmosphere pollution resulting from industrial development, especially in the second half of the foregone century, led to the series of greenhouse gas emission reduction agreements in the second half of the 90s, including the Kioto Protocol, December 1997. However the protocol came into power after its approval by 55 countries, including Poland, that is on February 16th 2005. It was never approved by China and USA, world’s largest polluters. The Kioto Protocol was valid until 2012. Despite that no subsequent agreement was made on any of the UN COPs (United Nations Conference of Parties) preceding the expiration date: from UN COP 14 (Poznan, Poland, 2008) to COP 17 (Durban, RSA, 2011) [1].
Conferences of Parties (COPs)
On December 12th, 2015, on COP 21 in Paris the world climate agreement was established by the representatives of almost 200 countries. Its main target is to stop the global warming way below 2°C, preferably 1.5°C [2]. The Paris Agreement gives the world a chance for a balanced development. In contrast to the Kioto Protocol the efforts for CO2 and other greenhouse gases content reduction is done simultaneously in two ways: by the reduction of their emission due to new technologies as well as their capture by forests. The Paris Agreement is the first international agreement that obliges all countries among the world to act for climate protection. Polish prime minister, Beata Szydlo, signed the agreement on October 7th, 2016.
By the time of the next COP 22 the agreement was adopted by: China, USA, Brazil, Canada, Mexico, and following EU countries: Poland, Austria, France, Germany, Hungary, Malta, Portugal and Slovakia. The fact that Poland was among few EU countries that adopted the act allowed for its standalone representation on COP 22 that took place in Marrakesh (Morocco), October 7th-18th 2016. Poland actively participated in the Parties to the Paris Agreement (CMA) negotiations. It especially praised the postulate to incorporate forest absorption as the way to reduce the CO2 content in the atmosphere as that solution has several additional positive effects. Over long terms it improves the quality of water, air, soil, protects the biodiversity as well as prevents animal migration.
The consecutive COP 23 took place in Bonn (Germany) on November 6th-17th, 2017 – after the election in the USA and Donald Trump taking up the position of the president. He announced that this country will withdraw from the Paris Agreement. The USA is responsible for 16% of the worlds total CO2 emission. As the result the international actions for CO2 emission reduction and climate protection require to be changed. Without strong leadership and forcing CO2 reduction regulations to reluctant countries no major advancement towards climate protection can be made and deep consequences of the climate change that we observe cannot be prevented. It especially applies to the People’s Republic of China, the worlds largest polluter (27.3%) and India (6.8%) which emission rates dynamically increase. From 2005 to 2015 The CO2 emission was reduced respectively: Poland by 0.6%, Germany 0.9%, by the whole European Union by 2% and USA by 1.1%. On the other hand over the same 10 year timespan the Chinese emissions increased by 4.2% and Indians by 6.8%. The COP 23 proceedings were finished by highest level meeting of CMA (Conference of Parties to the Paris Agreement), and CMP (13th Conference of Parties to the Kioto Protocol). The subsequent COP 24 will take place in Katowice (Poland) in 2018.
Smog and normative documents
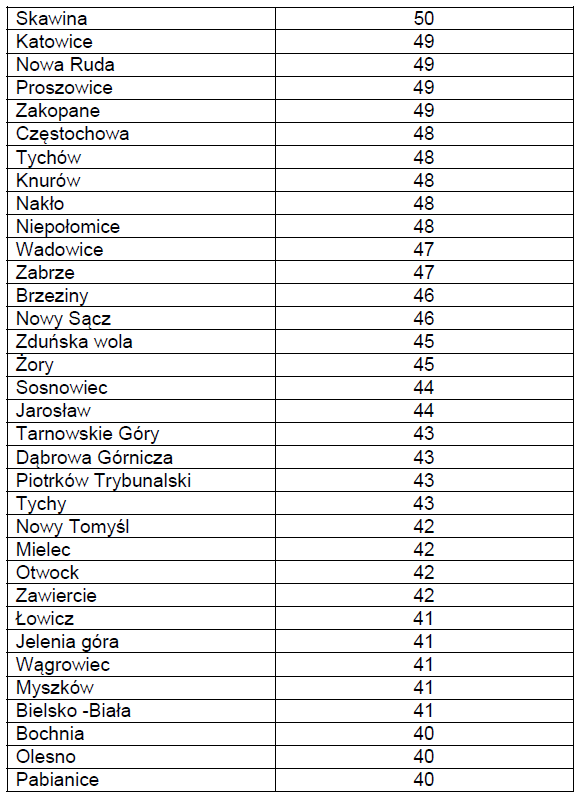
The World Health Organization (WHO) report presented on May 2016 states, that contrary to popular opinion not Cracow, but Zywiec is the Polish city that has the most polluted air (see table 1) [3]. According to European Environment Agency (EEA) Polish Silesia and Malopolskie Province territories are the most polluted areas in Europe (see Figure 1) [4]. Even one in five lung cancer cases in Poland can be caused by smog.
Table 1. The most smog-polluted cities of Poland [3]


Smog, due to high concentration of aggressive chemical factors pose a great health threat to humans and animals. It can cause circulatory system diseases, asthma, increased risk of cancer and can directly cause death due to chronic obstructive pulmonary disease (COPD). It also causes plant diseases and causes construction materials deterioration. The main particle matter PM10 (particles smaller than 10 mikrons) sources are the industry, traffic, domestic heating systems and agriculture.
On December 2015 the European Commission decided to submit Poland to the Court of Justice of the European Union (CJEU) due to persistent high level of particle matter content in the air which caused major concern for the public health. The case was eventually registered in CJEU in June 2016. In. 2017 the European Commission punished Bulgaria for exceeding the pollution norms and rebuked Poland.
Polish nuclear power engineering
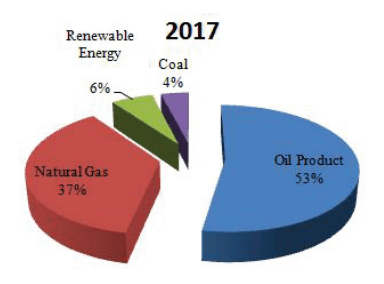
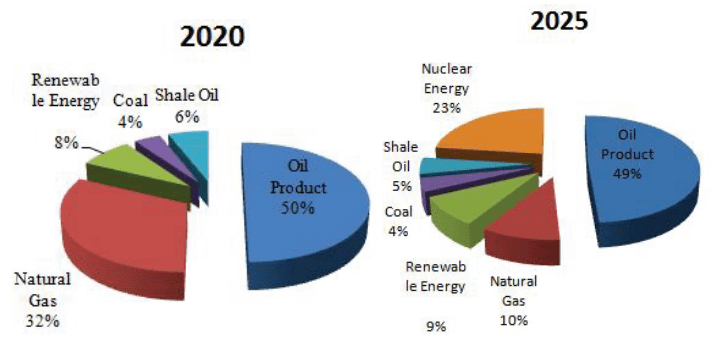
Polish power engineering is mainly based on coal. 80% of the energy is produced by conventional power plants. Despite the fact that renewable sources already supply a significant part of the energy they may be not enough to fulfill the requirements of Paris Agreement and EU power engineering policy. The development of nuclear power engineering may resolve both the problem of growing demand for electric energy as well as significantly reduce the CO2 and other greenhouse gases emissions.
In the early 1980s the construction of the first Polish nuclear power plant in Żarnowiec was started. The construction works were quite advanced, however, in 1986 the Chernobyl disaster happened. The construction works were ceased. According to then in force Atomic Law if the construction work of the nuclear power plant had been suspended for a year or above it had to be canceled. The Council of Ministers adopted the relevant law on December 17th, 1990. The date of deconstruction works beginning was set for December 31st, 1992. As the result of neglecting the education about the nuclear energy after the cancellation of Żarnowiec Nuclear Plant it was implicitly assumed that there will be no return to that technology.
The Chernobyl nuclear power plant failure from April 26th, 1986 was classified according to the International Nuclear and Radiological Event Scale (INES) as the catastrophe with the highest, 7 point score.

The INES scale was created by International Atomic Energy Agency (IAEA) experts to evaluate emergency events in nuclear installations in order to provide unambiguous messages to the public. Currently it is applied by over 60 countries, including Poland.
The next serious accident, classified as 6 out of 7 in INES scale, took place on March 11th, 2011 in Japanese nuclear power plant Fukushima I. As the result of the strongest earthquake ever registered in Japan, 8.8 Richter score, the secondary 10 m high tsunami wave was generated. The wave hit the power plant located at the Pacific Ocean coast, disabling the emergency cooling systems in all 4 active Boiling Water Reactors (BWR), causing cores meltdowns. The BWR even after emergency shutdown generates some heat due to spontaneous fission reaction and it needs to be dissipated. Those are old generation reactors, the first one of that type was activated in 1971.
After new generation of nuclear power plant reactors was designed and put into production the nuclear energy had its renaissance. In Poland after a series of discussions on January 13th, 2009 the Council of Ministers decided to start the new Polish Nuclear Power Engineering Program. A series of amendments was made for radiological protection, and personnel training laws, as well as several normative documents were adopted. The amended nuclear law came into force on July 1st, 2011 and on September 2014 its last updates were published in the Journal of Laws. However, up until now neither the location nor the technology for new nuclear power plant was chosen (see Fig. 3).
The cost of constructing the 3 GW (2x 1500 MW) nuclear power plant according to present prices is estimated at about 50 – 60 billions PLN. The government assesses that for the same price 3 conventional, coal fed power units can be built. However there is a tendency for CO2 emission charges to rise and can reach 40 – 50 billion PLN per year in the near future. Poland needs the final decision for building a nuclear power plant as the power demand in 2030 is estimated at 10 GW. If just the economical and safety factors are considered the conventional coal power units still unambiguously win but if the environmental requirements are included the nuclear power plants take over the lead.
Among the EU countries only Austria and Poland does not have nuclear power plants (see fig. 4) [6]. Over 20 years ago, on July 9th, 1997 the Austrian parliament voted for the country to stay antinuclear. The Austrian constitution was updated with the prohibition of the nuclear power plant construction as well as nuclear materials storage and transport to, from and through the territory of the country.
The III and III+ generation reactors
The European Pressurised Reactor (EPR) is a modern Pressurized Water Reactor (PWR) with 2 coolant loops, categorized as so called generation III+. It was designed as a the counterpart for the previous generation Pressurised Water Reactor (PWR). The new Russian power plant design VVER 1500/1600 by Rosatom meets the generation III+ requirements as well [8]. For technical parameter see table 2.
Table 2. The parameters of generation III and III+ reactor power units [8,9,10]

For generation III and III+ nuclear power plants one of the safety and reliability measures is the availability factor (AF). It is described as the percentage of time during which the power plant is able to produce full power over certain period of time. High AF value means that effective operation plan is being used that minimizes the unplanned shutdowns and optimizes the planned ones. In modern nuclear power plants average AF values of nearly 90% were reached [10]. Modern technologies also allow the minimize the radiation doses for the personnel. New nuclear power plant technologies were designed according to so – called “in depth security” rule. that is designing the processes with huge safety margins. Special mandatory systems prevent excessive deviations of the process parameters from their nominal values and if so happens they stop the failure growth and limit the affected area to the power plant itself. The radiation safety is implemented on the design stage. The fuel material. in which remain the 99.9% of fission byproducts. is encased in fuel material jackets made of Zirconium (Zr) – very tough and resistant to temperatures of order of thousand Celsius degrees [10].
All power plant systems undergo a regular maintenance schedule among the whole operational time (50-60 years) [8. 9. 10]. The safety features implemented in generation III reactors ensure the personnel safety even in case of serious accidents. including core meltdown followed by exothermic reaction of zirconium jackets with water and hydrogen extraction [10]:

where: Q – released thermal energy.
Power plants with PWR or EPR reactors can be equipped with a system in their secondary water loop that enables them to output not only the electrical energy (PG) but heat energy (QG) as well. the same way as it is done in conventional power plants. That solution increases the efficiency of the unit as a whole and thanks to central heating the end users pollute the environment less during the heating period. The efficiency of the power plant equipped with such system can be obtained from the formula:

where: ηel.b – gross efficiency of the unit. Q̇G – heat Energy stream for district heating. PG – gross electrical power on the generator output. Ḃu – fuel mass. Wd – stipulated heating value of the fuel.
Nuclear power engineering and the Paris Agreement
On COP 18 in Doha. Quatar. 2012. in which participated 17 thousand representatives of 194 countries. the representatives of the International Atomic Energy Agency (IAEA) were invited. The nuclear energy expert. Alan McDonald presented a report of the agency. titled: “Climate Change and Nuclear Power”. in which the nuclear energy was classified as clean energy [11].
The renewable energy source are still very expensive to operate. The Carbon Capture and Storage (CCS) technology. which introduces storing CO2 in the underground tanks. is in the early stage. Most of the renewable energy sources random to large extent. On this background the nuclear energy’s biggest advantages are its reliability and no CO2 emissions.
Countries with already developed network of nuclear plants fulfill the Climate Package and 3×20 Program assumptions with ease. as the nuclear power usually covers a huge percentage of energy demand. That refers particularly to France. where nuclear power plants produce almost 80% (77.7%) of the energy. At the advantage is also Slovakia (54%). Belgium (54%). Hungary (43.3%) Czech Republic and Bulgaria (33% in each case). Some of these countries develop or plan new nuclear power units. that incorporate new technologies.
On the contrary Germany fulfills the program of shutting down all nuclear reactors by the end of 2022. France adopted and fulfills the program for reducing the percentage of nuclear power to 50% in 2025. The government of Belgium adopted the program for shutting down all nuclear reactors by 2025. as their age will reach 40 year. Switzerland also plans to retreat from nuclear power with a plan to shut down their first nuclear power plant in 2019 and the last one in 2034.
Until 2030 the IAEA prognoses that the combined power of the nuclear power plants on the world will reach 400 GW in minimal and 699 GW in maximal variant. However after the Fukushima accident the IAEA prognoses for 2030. both minimal and maximal are being lower every year [12. 13]
Conclusion
1. The Kioto Protocol expired in 2012 but due to series of failed attempts on all the UN conferences from COP 14 to COP 20 no new agreement was made. On December 2015 on COP 21 in Paris. participated by the representatives from almost 200 countries. the new global climate agreement was signed. Its goal is to stop the global temperature increase significantly below 2°C. Participating countries would endeavor in the second half of the 21st century to balance the greenhouse gases emissions with their removal. including their absorption due to afforestation.
. At COP 18 in Doha. Quatar in 2012 the nuclear power expert. Alan McDonald presented a International Atomic Energy Agency (IAEA) report in which nuclear energy was classified as clean energy.
3. New generation III and III+ nuclear reactor designs enables to reach very high availability factor of 90% for nuclear power plants as well as very high safety.
4. After nuclear power engineering renaissance a series of negotiations was made and on January 13th. 2009 the Polish Council of Ministers decided to start new Polish Nuclear Energy program. The amended Atomic Law came into force on June 1st . 2011. On September 2014 its final updates were published.
5. For Poland when only economical and safety factors are considered the conventional. coal fed power units unambiguously win. However when the climate protection requirements of the Paris Agreement are considered too the nuclear power units take over the lead.
REFERENCES
[1] Pavlova-Marciniak I. “Implementation of climate policy assumptions in Poland”. 8th International Scientific Symposium on Electrical Power Engineering. 16 – 18 September 2015. Stara Lesna. Slovak Republic. pp. 455-458
[2] http://naukaoklimacie.pl/aktualnosci/porozumienie-klimatycznew-paryzu-124 (11.08.2018).
[3] http://tvn24bis.pl/ze-swiata.75/raport-who-najbardziejzanieczyszczone-miasta.643576.html (11.08.2018).
[4] http://naukawpolsce.pap.pl/aktualnosci/news.404026.raporteea-jakosc-powietrza-jednym-z-glownych-problemowpolski.html (11.08.2018).
[5] http://www.iaea.org/ (11.08.2018).
[6] http://www.nuclear.pl/ (11.08.2018).
[7] http://www.world-nuclear.org/information-library/countryprofiles/others/european-union.aspx (11.08.2018)
[8] http://www.world-nuclear.org/information-library/countryprofiles/countries-o-s/russia-nuclear-power.aspx (4.06.2017).
[9] http://www.atom.edu.pl/index.php/technologia/typyreaktorow/pwr/epr.html (11.08.2018).
[10] Strupczewski A.. “Comparision of Generation III and III+ reactors that could be offered to Poland”. Scientific Conference The Future of Nuclear Power in Poland („Porównanie reaktorów generacji III i III+. które mogłyby być oferowane Polsce”.). Warsaw 2007. s.95-120.
[11] https://www.iaea.org/newscenter/multimedia/videos/climatechange-and-nuclear-power-interview-alan-mcdonald (11.08.2018).
[12] http://www.atom.edu.pl/index.php/component/content/article/74-energetyka-jadrowa-na-swiecie/104-stan-energetyki-jadrowejna-swiecie.html (11.08.2018).
[13] http://biznesalert.pl/koniec-energetyki-jadrowej-we-francji/(11.08.2018).
Author: Dr inż. Iva Pavlova-Marciniak. Politechnika Częstochowska. Instytut Elektroenergetyki. Al. Armii Krajowej 17. 42-200 Częstochowa, E-mail: iva@el.pcz.czest.pl
Source & Publisher Item Identifier: PRZEGLĄD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 95 NR 8/2019. doi:10.15199/48.2019.08.02