Published by Nikola Zlatanov*
Short-Circuit Currents – General
The amount of current available in a short-circuit fault is determined by the capacity of the system voltage sources and the impedances of the system, including the fault. Voltage sources include the power supply (utility or on-site generation) plus all rotating machines connected to the system at the time of the fault. A fault may be either an arcing or bolted fault. In an arcing fault, part of the circuit voltage is consumed across the fault and the total fault current is somewhat smaller than for a bolted fault, so the latter is the worst condition, and therefore is the value sought in the fault calculations. Basically, the short-circuit current is determined by applying Ohm’s Law to an equivalent circuit consisting of a constant voltage source and a time- varying impedance. A time-varying impedance is used in order to account for the changes in the effective voltages of the rotating machines during the fault. In an AC system, the resulting short-circuit current starts out higher in magnitude than the final steady-state value and asymmetrical (due to the DC offset) about the X-axis. The current then decays toward a lower symmetrical steady-state value.
The time-varying characteristic of the impedance accounts for the symmetrical decay in current. The ratio of the reactive and resistive components (X/R ratio) accounts for the DC decay, see Figure 1.3-1. The fault current consists of an exponentially decreasing direct- current component superimposed upon a decaying alternating-current. The rate of decay of both the DC and AC components depends upon the ratio of reactance to resistance (X/R) of the circuit. The greater this ratio, the longer the current remains higher than the steady-state value that it would eventually reach. The total fault current is not symmetrical with respect to the time-axis because of the direct-current component, hence it is called asymmetrical current. The DC component depends on the point on the voltage wave at which the fault is initiated. See Table 1.3-2 for multiplying factors that relate the rms asymmetrical value of total current to the rms symmetrical value, and the peak asymmetrical value of total current to the rms symmetrical value. The AC component is not constant if rotating machines are connected to the system because the impedance of this apparatus is not constant. The rapid variation of motor and generator impedance is due to these factors:
Subtransient reactance (xd“), determines fault current during the first cycle, and after about 6 cycles this value increases to the transient reactance. It is used for the calculation of the momentary interrupting and/or momentary withstand duties of equipment and/or system.
Transient reactance (xd‘), which deter- mines fault current after about 6 cycles and this value in 1/2 to 2 seconds increases to the value of the synchro- nous reactance. It is used in the setting of the phase OC relays of generators and medium voltage circuit breakers.
Synchronous reactance (xd), which determines fault current after steady-state condition is reached. It has no effect as far as short-circuit calculations are concerned, but is useful in the determination of relay settings.
Transformer impedance, in percent, is defined as that percent of rated primary voltage that must be applied to the transformer to produce rated current flowing in the secondary, with secondary shorted through zero resistance.
Therefore, assuming the primary voltage can be sustained (generally referred to as an infinite or unlimited supply), the maximum current a trans- former can deliver to a fault condition is the quantity of (100 divided by percent impedance) times the transformer rated secondary current. Limiting the power source fault capacity will thereby reduce the maximum fault current from the transformer.
The electric network that determines the short-circuit current consists of an AC driving voltage equal to the pre-fault system voltage and an impedance corresponding to that observed when looking back into the system from the fault location. In medium and high voltage work, it is generally satisfactory to regard reactance as the entire impedance; resistance may be neglected. However, this is normally permissible only if the X/R ratio of the medium voltage system is equal to or more than 25. In low voltage (1000 V and below) calculations, it is usually worthwhile to attempt greater accuracy by including resistance with reactance in dealing with impedance. It is for this reason, plus ease of manipulating the various impedances of cables and buses and transformers of the low voltage circuits, that computer studies are recommended before final selection of apparatus and system arrangements.
When evaluating the adequacy of short-circuit ratings of medium voltage circuit breakers and fuses, both the rms symmetrical value and asymmetrical value of the short-circuit current should be determined. For low voltage circuit breakers and fuses, the rms symmetrical value should be determined along with either: the X/R ratio of the fault at the device or the asymmetrical short-circuit current.

Figure 1.3-1. Structure of an Asymmetrical Current Wave
Fault Current Waveform Relationships
The following Figure 1.3-2 describes the relationship between fault current peak values, rms symmetrical values and rms asymmetrical values depending on the calculated X/R ratio. The table is based on the following general formulas:
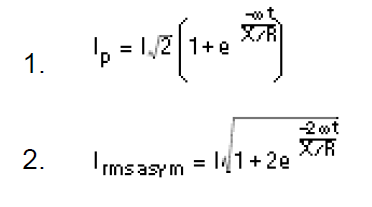
Where:
I = Symmetrical rms current
Ip = Peak current
e = 2.718
ω = 2πf
f = Frequency in Hz
t = Time in second
Based on a 60 Hz system and t = ½ cycle (ANSI/IEEE C37.13.1990/10.1.4)
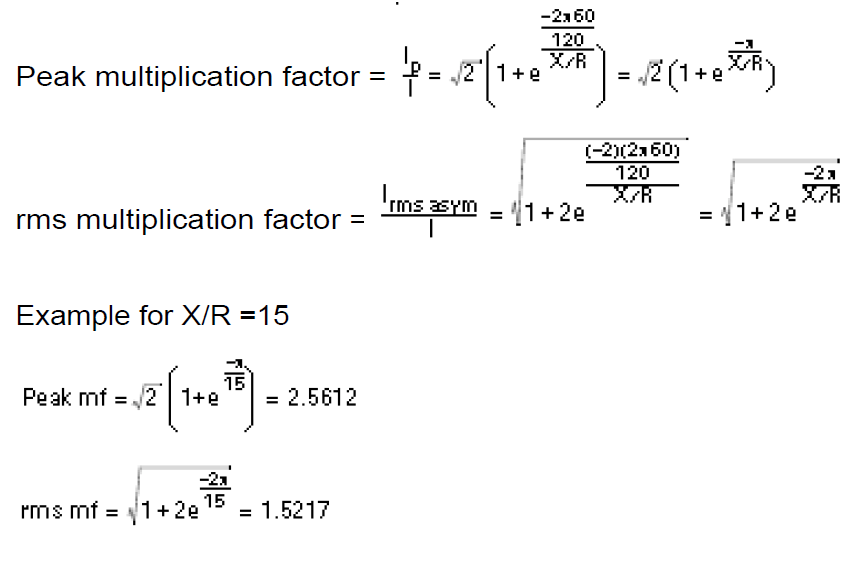
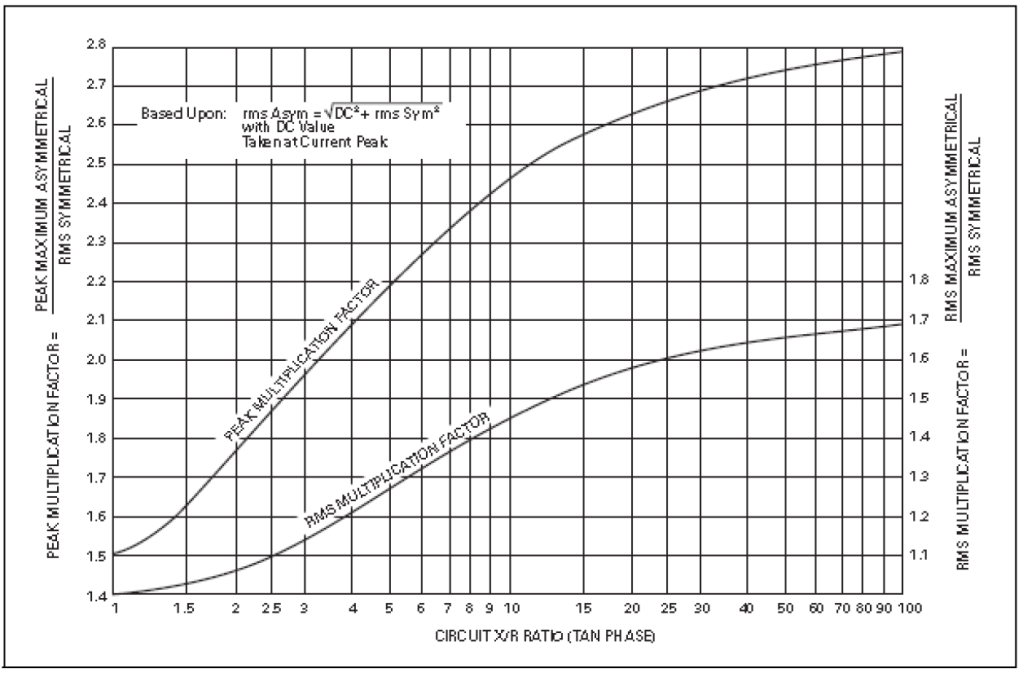
Figure 1.3-2. Relation of X/R Ratio to Multiplication Factor
Fault Current Calculations
The calculation of asymmetrical currents is a laborious procedure since the degree of asymmetry is not the same on all three phases. It is common practice for medium voltage systems, to calculate the rms symmetrical fault current, with the assumption being made that the DC component has decayed to zero, and then apply a multiplying factor to obtain the first half-cycle rms asymmetrical current, which is called the “momentary current.” For medium voltage systems (defined by IEEE as greater than 1000 V up to 69,000 V) the multiplying factor is established by NEMA® and ANSI standards depending upon the operating speed of the breaker. For low voltage systems, short-circuit study software usually calculates the symmetrical fault current and the faulted system X/R ratio using ANSI guidelines. If the X/R ratio is within the standard, and the breaker interrupting current is under the symmetrical fault value, the breaker is properly rated. If the X/R ratio is higher than ANSI standards, the study applies a multi- plying factor to the symmetrical calculated value (based on the X/R value of the system fault) and compares that value to the breaker symmetrical value to assess if it is properly rated.
In the past, especially using manual calculations, a multiplying factor of 1.17 (based on the use of an X/R ratio of 6.6 representing a source short-circuit power factor of 15%) was used to calculate the asymmetrical current. These values take into account that medium voltage breakers are rated on maximum asymmetry and low voltage breakers are rated average asymmetry. To determine the motor contribution during the first half-cycle fault current, when individual motor horsepower load is known, the subtransient reactance found in the IEEE Red Book should be used in the calculations.
When the system motor load is unknown, the following assumptions generally are made: Induction motors—use 4.0 times motor full load current (impedance value of 25%).
*Mr. Nikola Zlatanov spent over 20 years working in the Capital Semiconductor Equipment Industry. His work at Gasonics, Novellus, Lam and KLA-Tencor involved progressing electrical engineering and management roles in disruptive technologies. Nikola received his Undergraduate degree in Electrical Engineering and Computer Systems from Technical University, Sofia, Bulgaria and completed a Graduate Program in Engineering Management at Santa Clara University. He is currently consulting for Fortune 500 companies as well as Startup ventures in Silicon Valley, California.

You need to take part in a contest for one of the best sites on the web. I most certainly will highly recommend this web site!
LikeLike
bookmarked!!, I really like your blog!
LikeLike