Applications Guide, April 2001
Published by Fluke Corporation
Introduction
This section provides examples that you can use to troubleshoot induction motors with and without an adjustable speed drive.

Figure 4. Distribution System: Motor Loads
Induction Motors
Checking Voltage Imbalance
For 3 phase induction motors, the supply voltage on all three phases should be in balance. Voltage imbalance causes high unbalanced currents in the stator windings, resulting in overheating and reduced motor life.
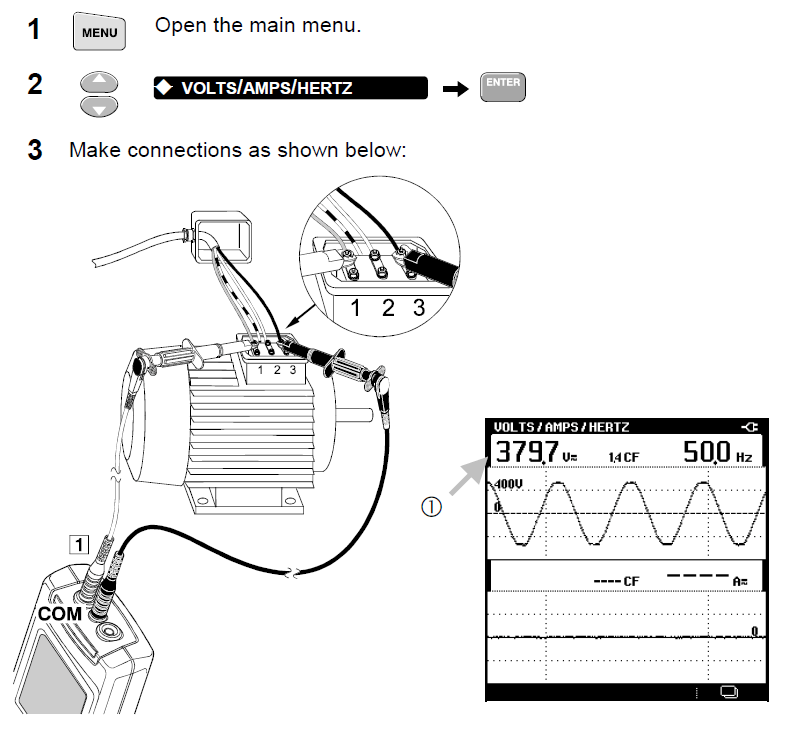
- Write down the voltage reading of phase 1 to phase 3 (V1-3).

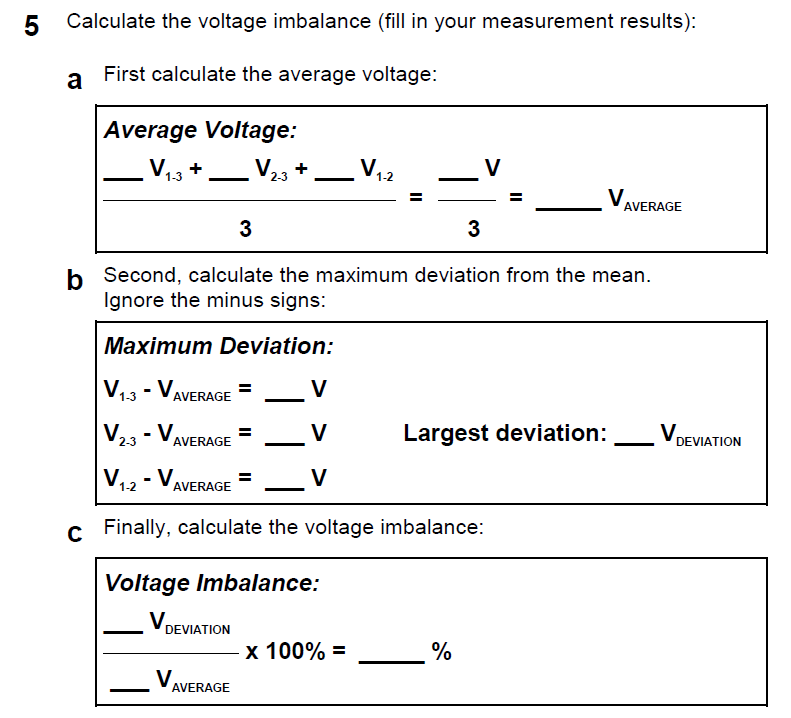
Voltage imbalance for three-phase motors should not exceed 1%. Voltage imbalance may be caused by bad connections, contacts or fuses; or is caused by problems at the source transformer.
Example

Checking Current and Current Imbalance
After checking voltage imbalance, check for current and current imbalance. Unbalanced currents cause overheating and reduce motor life. Also single phasing (complete loss of power on one of the phases feeding the motor) may cause overheating in the two other phase windings.

- If no current is present, you may assume an open fuse or winding.
- Write down the current reading (A1).


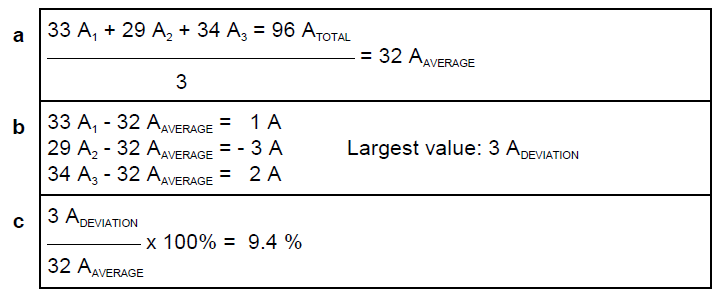
Current imbalance for three-phase motors should not exceed 10%.
Example
Note: To detect single phasing, always check the current on all three phases. When a voltage measurement is made at the motor terminals, the voltages will read close to normal as motor action is inducing voltage into the open winding.
Measuring Power in 3-Phase Balanced Systems
The Fluke 43B can perform power measurements on 3-phase, 3-conductor balanced power systems. The load must have approximately the same voltage and current on all three phases, and must be wired in a wye or delta configuration.
The balanced load makes it possible to calculate 3-phase power from one current and one voltage channel. Three phase power measurements are possible for the fundamental only.
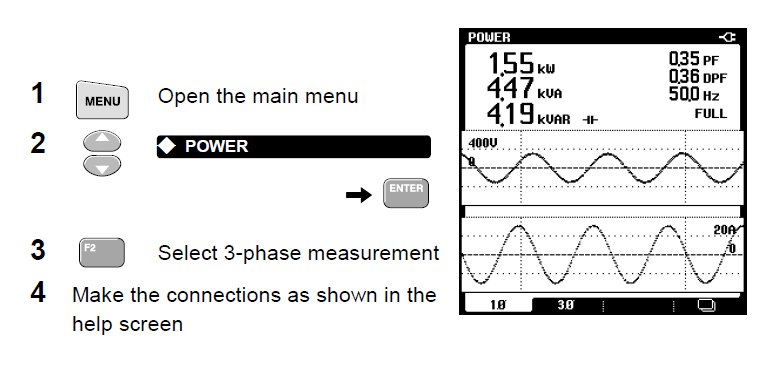

The voltage and current waveforms are displayed with a phase shift of 90°. This is due to the fact that voltage and current are measured in different phases. This phase shift is automatically corrected for the readings.
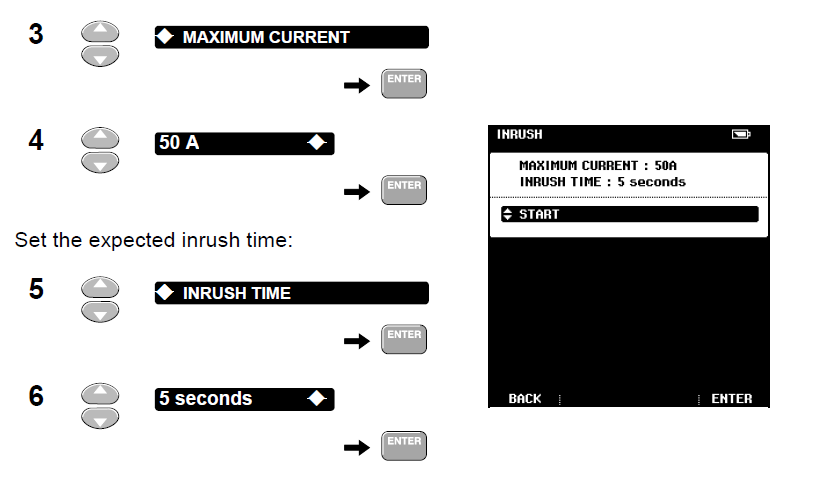
Measuring Peak and Inrush Current
High inrush currents of motors can cause breakers to trip or fuses to open.

Set the maximum expected current during the inrush. This might be 6 to 14 times the full load current of the motor.

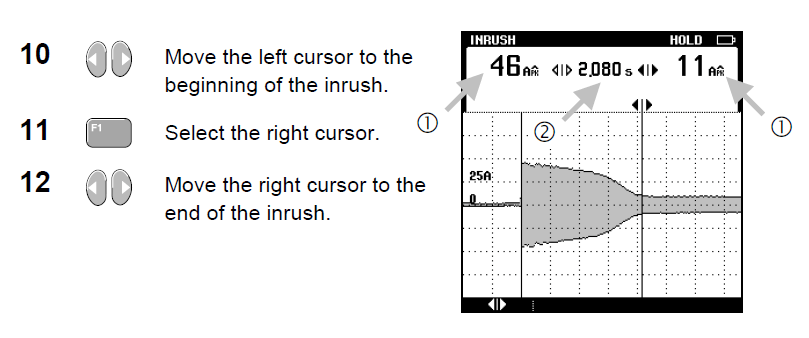
- Read the peak currents at the cursors. Can fuses and breakers withstand these currents? Are conductors properly sized?
- Read the time between the cursors. Can fuses and breakers withstand the inrush current during this period? Fast acting breakers and fuses may trip.

Measuring Power Factor of 3-Phase Motors
A power factor with a value close to 1 means that nearly all supplied power is consumed by the motor. A power factor of less than 1 results in extra currents, called reactive currents. This requires larger power lines and transformers. Also there will be more power loss in the transmission lines.
Grounded Y-Connection with Balanced Load
For balanced motors with a grounded Y-connection, you can read the Power Factor directly from the screen. To test for a grounded Y, simply check the three phase-to-ground voltages. If the voltages are stable and equal, then the system is wired as a grounded Y. Measure Power Factor as follows:

- Observe the Power Factor.
Delta connection or floating systems
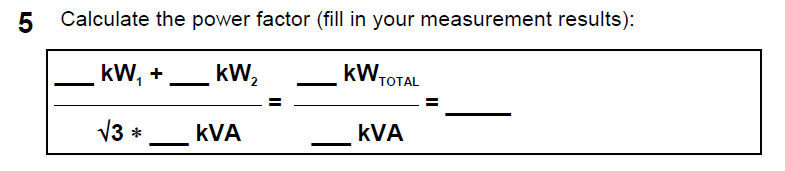
For delta systems, the procedure is more complex. Use the following procedure to calculate the Power Factor for a 3-phase grounded delta connected motor or for floating sources.

- Write down the true power reading (kW1) from phase 1 to 3.
- Write down the apparent power reading (kVA).

Write down the value for true power reading (kW2). If the power factor is smaller than 1, kW1 and kW2 will be different even if the load currents are equally balanced. Note that the apparent power (kVA) is equal to the first measurement.
Example

Poor power factor can be improved by adding capacitors in parallel with the load.
If harmonics are present, consult with a qualified engineer before installing capacitors. Non-linear loads such as adjustable frequency motor drives cause non-sinusoidal load currents with harmonics. Harmonic currents increase the kVA and thereby decrease total power factor. Poor total power factor caused by harmonics requires filtering for correction.
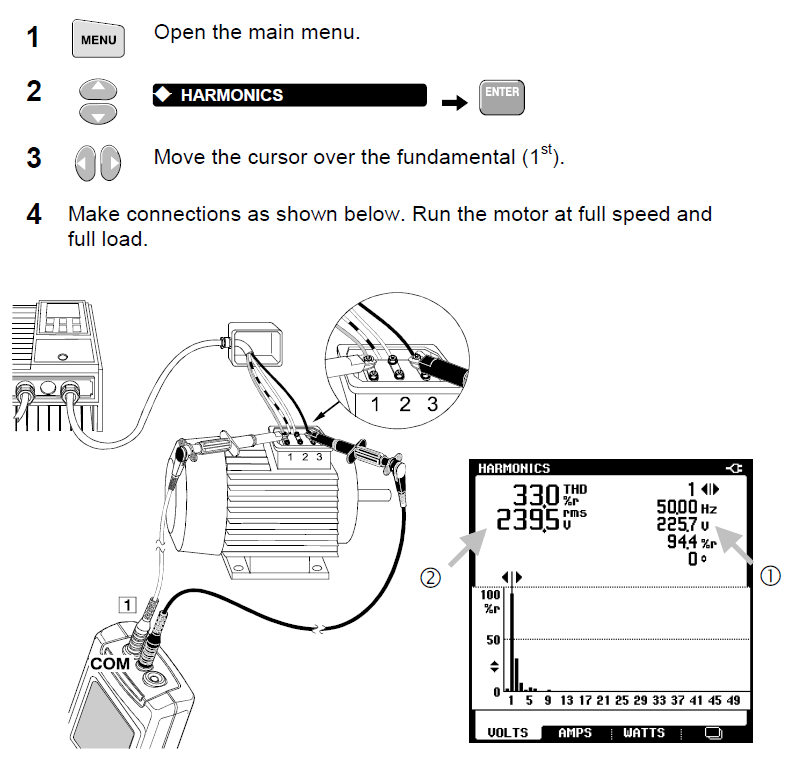
Measuring Voltage Harmonics
When the supply voltage is distorted by harmonics, the motor can suffer from overheating.

- Look at the THD reading. In general, the Total Harmonic Distortion of the voltage supplied to an induction motor should not exceed 5%.
- Look at the harmonic spectrum. Negative sequence harmonics (5th, 11th, 17th, etc.) will cause most heating because they try to run the motor slower than fundamental (they create reverse rotating magnetic fields within the motor). Positive sequence harmonics (7th, 13th, 19th, etc.) also cause heating because they try to run the motor faster than fundamental.
Adjustable Speed Drives
Checking Current on Phases
When a motor drive is tripping, first check for voltage imbalance (see “Checking Voltage Imbalance”. Then check the current on all three phases feeding the motor.

- If no current is present, you may assume an open fuse or an open circuit in wiring. The drive will trip.

Measuring Fundamental of Motor Voltage
Check the condition of a drive.
- Read the voltage of the fundamental. The voltage should be slightly less than the line voltage. If the voltage is significantly lower than the line voltage, it indicates an improper drive. To be sure, compare with a known good drive.
- Read the total rms voltage. If the value on the drive display is lower, the display probably shows the average voltage or fundamental instead of the rms voltage.
Measuring Frequency of Motor Current
The frequency of the motor current correlates with motor speed.

- Vary the speed of the motor and look at the frequency and the waveshape of the current. The frequency of the current should correlate with the speed of the motor.

Note: Because there is no voltage signal present, the frequency is calculated from the current signal on input 2.
