Published by R. Fehr, P.E., Engineering Consultant, Jan 1, 2004
Here’s how to reduce the effect of capacitor switching on your power system
Last month’s article discussed exactly what happens when electric utilities switch shunt capacitors: power system components are exposed to transient voltages and currents produced by energizing and de-energizing these devices. Those transients may be short-lived, but they have high peak values and frequencies much greater than the power system fundamental frequency. Now it’s time to investigate the effects these transients have on your power system.
Negative effects aplenty. When an electric utility or end-user energizes a shunt capacitor, the high-frequency switching transients produce overvoltages on the capacitor bus. These overvoltages may be significant enough to cause arrester operation or even equipment failure. However, these overvoltages aren’t always localized. Since the transients have a frequency much higher than the power system frequency, the system behaves much differently when subjected to these high frequencies than it does with the normal power system frequency.
Transient high voltages can often show up a considerable distance from the capacitor bus due to resonance-like conditions caused by the switching transients. Fast transient overvoltages, which occur as the transients pass through transformers and are magnified due to capacitive coupling, are symptomatic of this condition. Open-circuited lines also contribute to overvoltage conditions by reflecting the traveling transient voltage waveform back to the source, where it can add to the standing voltage waveforms and produce high-voltage surges.
De-energizing a shunt capacitor can also cause power quality problems due to the transient overvoltages produced by re-ignitions and restrikes during the current interruption process. Because of the increased probability of excessive arcing in the switching device during current interruption, the likelihood of switching device failure increases significantly during the de-energization process.
In both the energizing and de-energizing cases, equipment very near or at significant distances from the capacitor location will be subject to voltage stresses that could result in insulation failure. Surge arrester operation and failure are also more likely to occur during capacitor switching than under steady-state conditions.
High-frequency transients at the capacitor location often introduce electrical noise into control circuits, which can lead to equipment misoperation. Even nuisance tripping or damage to devices is possible. A ground potential rise during the transient period can cause system protection misoperation and even pose a safety hazard to personnel working nearby if grounding is inadequate. These effects are potentially serious and must be counteracted in some way.
Double trouble. To further complicate the situation, two or more capacitor banks located close to one another make the situation worse. These negative effects of the transient become extremely severe in the vicinity of the capacitors for several reasons.
The transients produced when a shunt capacitor is energized in the vicinity of an already-energized shunt capacitor are much more severe than those produced when a single isolated capacitor is switched. It’s very important to understand this phenomenon, which is called back-to-back switching, to avoid the negative consequences.
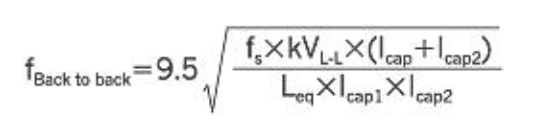
The zero voltage that occurs at the moment of contact closure when the second capacitor is energized makes it appear to the system as a short circuit. This apparent momentary short circuit will cause any energized capacitor nearby to discharge into the second capacitor. In addition, the two capacitors in parallel appear as a larger equivalent capacitance rather than one capacitor alone, making the inrush current magnitude much larger than for a single capacitor. The inductance of the system between the two capacitors, Leq, is the quantity that limits the inrush current. Back-to-back induction can be found with the following equation:

This higher inrush current has a frequency much higher than the inrush current for a single capacitor. Both the magnitude and the frequency of the inrush current during back-to-back switching are typically an order of magnitude larger than those seen when energizing a single capacitor. The frequency of the inrush current can be hundreds of times greater than the power system frequency, fs, as shown in the equation below:
Reducing the effects of capacitor switching. You can use one of several methods to reduce the problems associated with capacitor switching, including equipping circuit breakers with pre-insertion resistors, outfitting circuit switchers with pre-insertion reactors, or tightly controlling the point on the waveform when the capacitors are actually switched.
Pre-insertion resistors. One technique involves breaking the switching operation into a multi-step process and inserting a temporary impedance into the circuit during one of the steps. This approach breaks one large transient into two or more smaller ones. Circuit breakers can be built with internal pre-insertion resistors to reduce the magnitude of switching transients. These resistors, typically in the 100-ohm to 400-ohm range for single, extra-high voltage (EHV) capacitors, are in series with the interrupter when the contacts close, but remain in the circuit just long enough to damp the transients, usually for ½ to 1 cycle. After that time, they’re shorted out with a make-before-break connection between the resistor contacts and the main contacts, and remain out of the circuit until the next time the breaker is closed. This process is shown schematically in Fig. 1.

Pre-insertion resistors add both complexity and cost to a breaker. They’re also another item that requires scheduled maintenance. While pre-insertion resistors reduce transients during capacitor energization, they’re not used when the capacitor is de-energized, so those transients go unabated during that form of switching.
Pre-insertion reactors. Circuit switchers can be outfitted with pre-insertion reactors to reduce transients when closing into capacitive loads. These reactors, which are small air-core inductors typically in the 10-millihenry to 40-millihenry range, are mounted externally on the switcher. When the switcher closes, a spring-loaded contact blade swipes over a reactor contact, energizing the reactor in series with the capacitor when it touches the reactor contact. The reactor remains in the circuit while the blade swipes across the reactor contact, usually for about seven to 12 cycles, depending on the system voltage. The blade keeps moving past the end of the reactor contact, at which point a make-before-break connection is made with the main contact. The blade comes to rest on the main contacts, which keeps the capacitor in the circuit, but bypasses the reactor. The brief period while the reactor is in series with the capacitor is sufficient to dampen the energization transients.
Schematically, this process is identical to the pre-insertion resistor switching process shown in Fig. 1. While less expensive and probably more reliable than pre-insertion resistors, pre-insertion reactors are complicated, require careful alignment and adjustments, and are rather exciting to watch as they arc and spark when operated.
Point-on-wave switching. In the ’80s, a different approach to managing capacitor switching transients began to emerge. Instead of electrically modifying the system with resistors or reactors to reduce the effect of the switching transients, engineers left the system as is but addressed the transients themselves. By precisely controlling where on the voltage waveform the contacts touch, it’s possible to greatly reduce the magnitudes of the switching transients. This approach, called controlled switching or point-on-wave switching, is used extensively throughout the world not only for switching capacitors, but also for switching shunt reactors, energizing transformers, and even switching transmission lines.
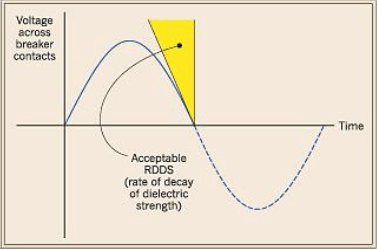
Here’s how it works. As the voltage difference across an open circuit breaker increases during closing, the dielectric strength of the gap between the open contacts decays. It’s possible to measure a breaker’s pre-strike voltage in relation to the time of contact touch. Graphing these measurements approximates a line whose slope represents the rate of decay of dielectric strength (RDDS). For a breaker to be a suitable capacitor-switching device, its RDDS must exceed the rate of the system voltage change. Fig. 2 shows the acceptable RDDS region.
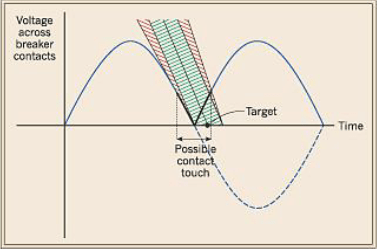
Ideally, the capacitor should be energized when the voltage across the breaker contacts is zero to minimize switching transients. Consider the zero crossing on the voltage waveform, which is our point-on-wave “target” for contact touch. Fig. 3 on page 22 shows a green shaded region that depicts the range of mechanical scatter for a particular circuit breaker. The purple shaded region shows the range of dielectric scatter for the same circuit breaker (Sidebar below). Since the scatters are additive, contact touch can occur anywhere along the black portion of the voltage waveform.

This possible contact touch time window is skewed considerably to the left of the target, indicating a high probability of circuit completion prior to the zero voltage crossing. Early completion of the circuit will result in pre-striking, which will produce severe transients. This situation can be avoided by slightly retarding the point-on-wave target to just after the zero crossing, as shown in Fig. 4. This delay increases the probability of contact touch at the zero crossing.
Another benefit of controlled switching is, unlike the transient mitigation methods discussed earlier, you can use it for capacitor de-energization. The precise timing of each pole is controlled by a microprocessor. The software controlling the timing can be adaptive to adjust for physical and environmental variables, thereby reducing some of the uncertainties represented by scatter. Over the years that controlled switching has been used, the control methods have become much more sophisticated than those used by the first controllers.
Controlled switching is complicated greatly by the mechanical limitations of the circuit breaker. Even with contact speeds in excess of 10 m/sec, transient recovery voltage characteristics of some circuit breakers aren’t adequate for some capacitor switching applications. Mechanical and dielectric scatter can lead to a switching performance that’s considerably less than optimum performance. One way to avoid these problems is to replace the mechanical circuit breaker with a solid-state switching device.
Solid-state electronics don’t solve all the challenges involved with controlled switching. In fact, they tend to exchange one set of problems for another. They do, however, appear to be a viable technology for capacitor switching, particularly at low and medium voltages. Solid-state switching eliminates mechanical scatter, reduces dielectric scatter, and can almost do away with inrush and the associated harmonics during capacitor switching.
Because the current leads the voltage by 90°, the anode-to-cathode voltage of the switching device is reverse-biased for ¼ of the cycle while the current direction is from anode to cathode. This means that self-commutating devices like thyristors must be provided with a gating signal through the full 360° to ensure full conduction. Semiconductor switches used in capacitive switching applications must also endure high peak inverse voltages (PIVs) in excess of 3.5 times the line-to-line voltage. This is because the charge trapped in the capacitor when the switch commutates off holds the absolute value of the capacitor voltage at peak while the system voltage continues to oscillate. This condition exposes the switch to full peak-to-peak voltage, which is 2.83 times the rms voltage. When you allow for tolerances in system voltage and a reasonable safety factor, this PIV requirement can exceed 3.5 times the line-to-line voltage. These requirements lead to high cost components and implementation challenges at the higher voltages. However, as power electronics continue to evolve, these challenges are sure to be conquered.
Fehr is an independent engineering consultant located in Clearwater, Fla.
Sidebar: Circuit Breaker Mechanics
The stored energy system that moves the movable contact when the breaker’s trip or close coil is energized is made up of springs or hydraulic components. The spring has a spring “constant” that determines the contact velocity that will be attained upon opening. However, this spring constant tends to vary slightly with the spring’s temperature, age, and the amount of time it was in its compressed state. The performance of the hydraulic system also varies somewhat with temperature, pressure, and the condition of the hydraulic fluid. These variables lead to slightly different operating characteristics each time the breaker operates. Upon statistical analysis of these variables, it’s possible to determine a probabilistic distribution of operating speed. This range of mechanical performance is called mechanical scatter.
Likewise, the insulating medium that surrounds the contacts, usually sulfur hexafluoride gas (SF6) or a vacuum chamber for modern medium- and high-voltage breakers, tends to have slightly different electrical properties under different operating conditions. The number of operations performed by the interrupter, the purity of the dielectric medium, the pressure in the interrupter, and temperature of the dielectric medium are the major variables that affect the electrical properties of the dielectric. More importantly, the condition, namely the surface roughness, of the interrupter contacts and the surrounding dielectric materials, such as gas porting nozzles, influence the electric field distribution within the interrupter. It’s also possible to statistically analyze these variables and develop a dielectric scatter. Smooth contact surfaces and clean porting nozzles are vital for successful capacitor switching.

I love the 1st and 2nd papers. Very simple and strong technical argument to explains the side effects expected with cap banks switching.
LikeLike
Thank you for your valuable comments!
LikeLike